事件驱动状态机state machine

需积分: 0 161 浏览量
更新于2022-11-11
收藏 3.05MB PDF 举报
事件驱动状态机State Machine
事件驱动状态机(Event-Driven State Machine)是一种特殊类型的状态机,它的状态 transition 由事件(Event)驱动。这种状态机广泛应用于许多领域,如嵌入式系统、机器人控制、自动化控制系统等。
在事件驱动状态机中,每个状态都可以触发一个或多个事件,该事件可以触发状态的变化。事件可以来自外部输入、时钟信号、网络消息等各种来源。状态机通过处理这些事件来实现状态的变化。
事件驱动状态机的优点包括:
1. 灵活性强:事件驱动状态机可以根据不同的事件触发不同的状态变化,从而实现灵活的控制逻辑。
2. 可扩展性强:事件驱动状态机可以轻松地添加或删除事件,从而实现系统的扩展和修改。
3. 高可靠性:事件驱动状态机可以通过事件的触发来实现状态的变化,从而提高系统的可靠性。
然而,事件驱动状态机也存在一些缺点:
1. 复杂度高:事件驱动状态机的实现需要考虑多种事件的触发和状态的变化,从而增加了系统的复杂度。
2. 调试困难:事件驱动状态机的调试需要考虑多种事件的触发和状态的变化,从而增加了调试的难度。
在软件开发中,事件驱动状态机可以使用Finite State Machine(FSM)来实现。FSM是一种数学模型,用于描述状态机的行为。FSM由三个组件组成:
1. 状态集(State Set):定义了状态机的所有可能状态。
2. 事件集(Event Set):定义了状态机的所有可能事件。
3. 转换函数(Transition Function):定义了状态机在不同状态和事件下的行为。
在实践中,事件驱动状态机可以应用于许多领域,如:
1. 嵌入式系统:事件驱动状态机可以应用于嵌入式系统中,用于控制设备的状态和行为。
2. 机器人控制:事件驱动状态机可以应用于机器人控制中,用于控制机器人的状态和行为。
3. 自动化控制系统:事件驱动状态机可以应用于自动化控制系统中,用于控制系统的状态和行为。
事件驱动状态机是一种强大且灵活的状态机模型,广泛应用于多个领域。但是,它也存在一些缺点,需要在实际应用中加以注意。
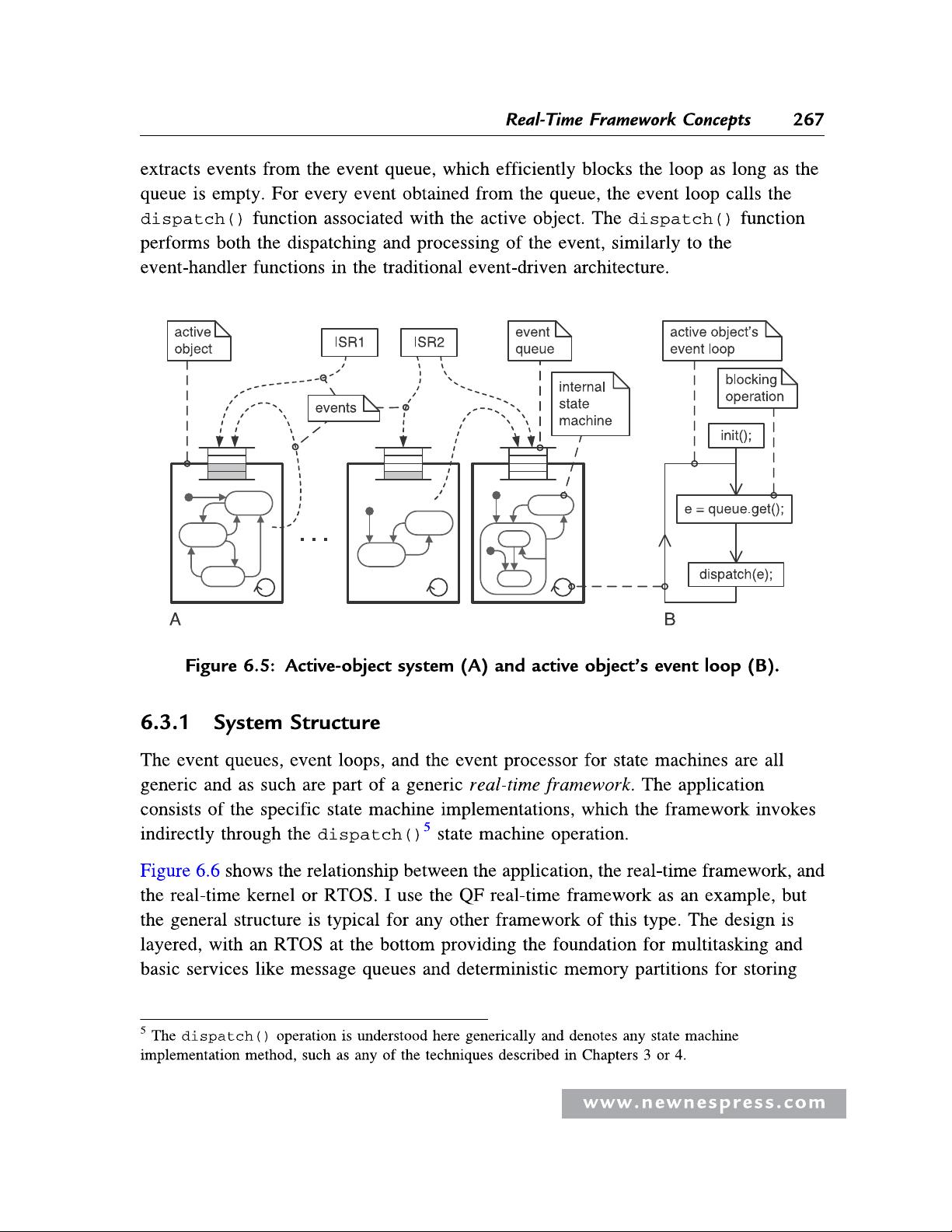
Active Objects(Actors)是事件驱动状态机的一种实现方式。Active Objects是由Miro Samek所著的《Practical UML Statecharts in C/C++, 2nd Edition》一书中提出的概念。Active Objects是一种基于事件驱动的状态机模型,用于实现复杂的控制逻辑。Active Objects由三个组件组成:
1. 状态机(State Machine):定义了状态机的状态和行为。
2. 事件队列(Event Queue):用于存储和处理事件。
3. 执行器(Executor):用于执行状态机的行为。
Active Objects具有以下优点:
1. 高可扩展性:Active Objects可以轻松地添加或删除事件和状态,从而实现系统的扩展和修改。
2. 高灵活性:Active Objects可以根据不同的事件触发不同的状态变化,从而实现灵活的控制逻辑。
3. 高可靠性:Active Objects可以通过事件的触发来实现状态的变化,从而提高系统的可靠性。
事件驱动状态机是一种强大且灵活的状态机模型,广泛应用于多个领域。Active Objects是事件驱动状态机的一种实现方式,具有高可扩展性、高灵活性和高可靠性。

Active Objects
(Actors)
Excerpts from the book
“Practical UML Statecharts in C/C++, 2
nd
Edition”
剩余14页未读,继续阅读
120 浏览量
2021-07-03 上传
136 浏览量
151 浏览量
2010-12-04 上传
2022-09-24 上传
2021-05-07 上传
110 浏览量
2021-03-09 上传
2021-03-08 上传
186 浏览量
2021-06-29 上传
126 浏览量
2023-06-15 上传
161 浏览量
2021-04-27 上传
151 浏览量
129 浏览量
2017-08-23 上传
2013-06-04 上传
2018-07-27 上传
资源评论


longroaming
- 粉丝: 0
- 资源: 5









最新资源
- Carsim自动驾驶车辆漂移控制 Carsim与Simulink联合仿真,基于LQR的无人车定圆稳态飘移漂移控制算法,默认B级车,可以定制carsim内多个车型,Simulink模型+Carsim数据
- 第5章 全局大喇叭-详解广播机制.pdf
- win32汇编环境,对话框中设置RichEdit内文本的字体
- fpga mips vivado verilog 五级流水线cpu设计 55条指令
- 第6章 数据存储全方案-详解持久化技术.pdf
- comsol仿真教程,多物理场,建模仿真,低频电磁
- 永磁同步电机伺服控制仿真三环PI参数自整定 Matlab仿真模型 1.模型简介 模型为永磁同步电机伺服控制仿真,支持 Matlab 各个版本 模型内主要包含DC直流电压源、三相逆变器、永
- compat-openssl10-1.0.2o-3.el8.x86-64.rpm
- 新东成食品进销存管理信息系统的设计和开发(源码+lw)
- 基于分数阶扰动观测器的伺服系统摩擦补偿Matlab仿真 1.模型简介 模型为基于分数阶扰动观测器的摩擦补偿仿真,仿真基于永磁同步电机速度、电流双闭环控制结构开发,双环均采用PI控制,PI参数已经
- net-tools-2.0-0.52.20160912git.el8.x86-64.rpm
- 糖果消消乐 cocos creator 3.8.2,资源仅供学习交流,禁止商用
- Java Swing图形界面实现简单烟花效果的示例代码
- 分布式驱动汽车稳定性控制 采用纯Simulink模型搭建,包括控制策略和车辆动力学模型 采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制 可灵活对四种控制器
- 【震撼来袭ROS2+CARLA联合仿真,Lattice算法尽在掌控】 解锁智能车新世界,ROS2与CARLA联手打造顶级联合仿真体验告别繁琐安装,一键开启科研与工作的无限可能 亮点一:版本精选,稳
- 基于多二阶广义积分器的谐波提取复现 基于多二阶广义积分器的电网谐波分量提取,可以准确提取电网中的基频负序,5次负序,7次正序,11次负序,13次正序电压幅值,可以根据需求增加更高谐波的提取 默认发2
