光伏板最大功率跟踪(MPPT)算法
需积分: 2 153 浏览量
2023-12-05
15:36:54
上传
评论
收藏 109KB DOCX 举报

一、扰动观察法
众所周知,一般正常条件下,光伏电池 P- U 特性曲线是一个以最大功率点为极值的单
峰值函数,这一特点为采用扰动观测法来寻找最大功率点提供了条件,而扰动观测法实际上
采用了步进搜索的思路,即从起始状态开始,每次对输入信号做一有限变化,然后测量由于
输入信号变化引起输出变化的大小及方向。待方向辨别后,再控制被控对象的输人按需要的
方向调节,从而实现自寻最优控制。将步进搜索应用于光伏系统的 MPPT 控制时,就是所称
的扰动观测法。
光伏器件在最大功率点两侧 dP/dV 的特性表达式如式 1。式中 dP 和 dV 分别代表相邻两
个采样周期光伏器件的输出功率和输出电压的变化。
0
/ 0
0
dp dv
<
ì
ï
= =
í
ï
>
î
最大功率点右侧
最大功率点
最大功率点左侧
(1)
扰动观测法按每次扰动的电压变化量是否固定,可以分为定步长扰动观测法和变步长扰
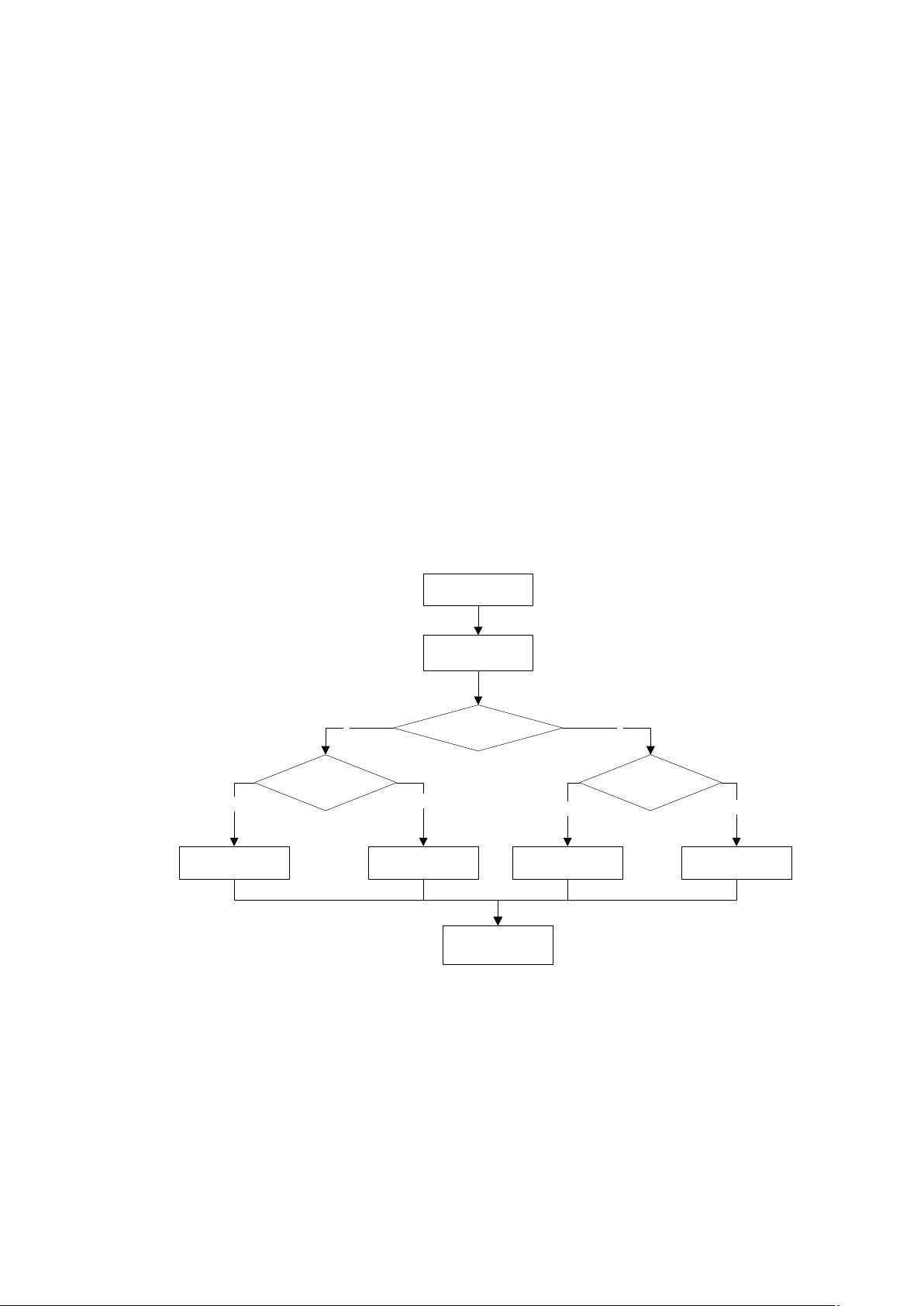
动观测法两类,定步长扰动观测法的流程图如图 1 所示.
检测U(k)、I(k)
计算功率P=UI
P(k)<=P(k-1)
U(k)>U(k-1) U(k)>U(k-1)
Uref=Uref+dU Uref=Uref-dU Uref=Uref-dU Uref=Uref+dU
N Y
Y
N
Y
N
返回
图 1 定步长扰动观测法流程图
基于滞环比较的扰动观测法(三点比较法)
在扰动观察法基本设计思想中是两点比较,即目前的工作点与上一个扰动点比较,判断
功率的变化方向从而决定工作电压的移动方向,除了造成较多的扰动损失外,还可能发生误
判。针对太阳日照量并不会快速变化的特点,多余的扰动可能带来较多的损失。这里提出的
资源评论













