
基于单片机的超声波测距
1 超声波测距原理:
超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射
时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超
声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为
v ,
而根据计时器记录的测出发射和接收回波的时间差△
t ,
就可以计算出发射
点距障碍物的距离
S ,
即
: S
=
v·
△
t /
2
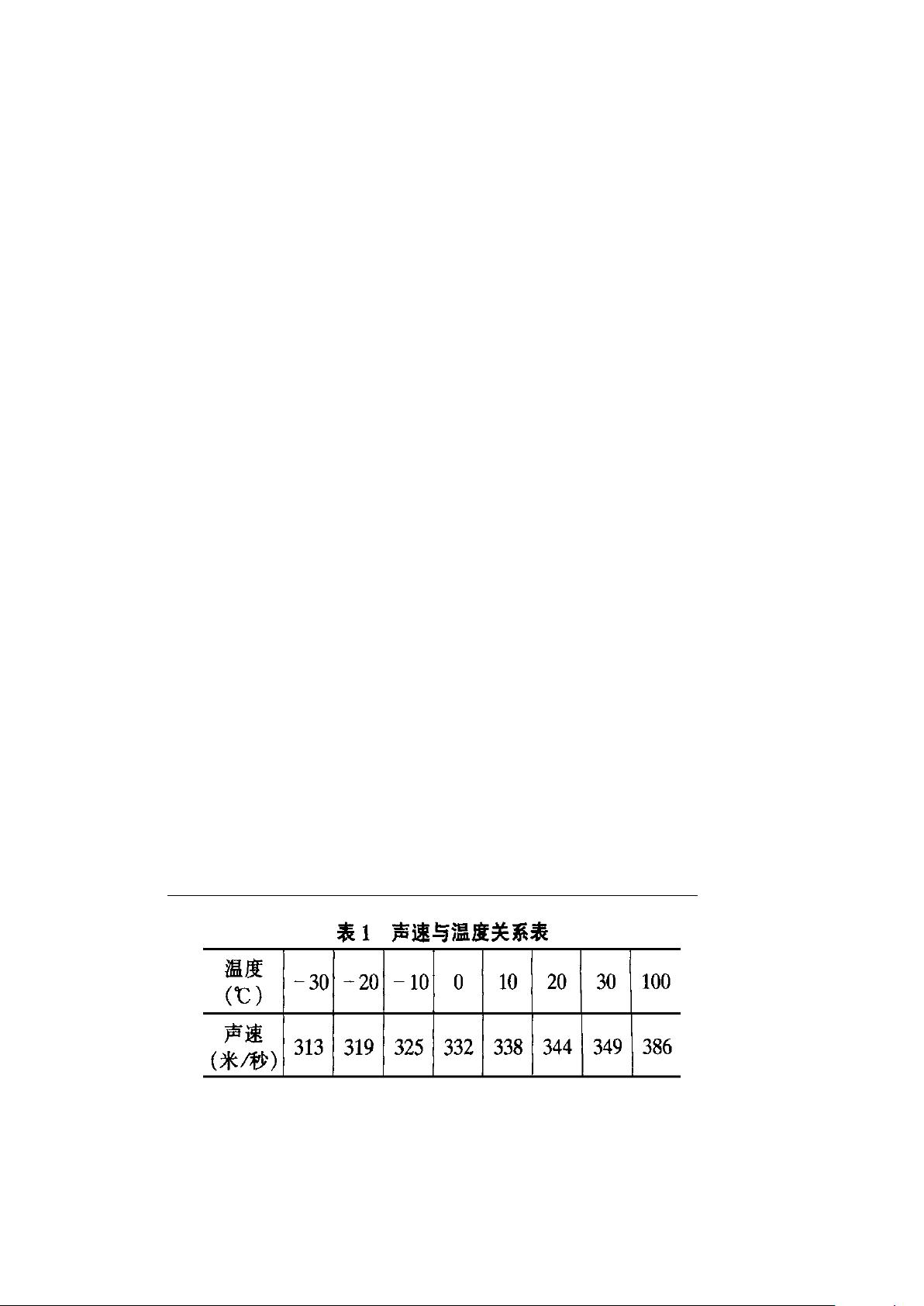
由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温
度下的声速。在使用时,如果温度变化不大, 则可认为声速是基本不变的。
常温下超声波的传播速度是334 米/秒,但其传播速度
V
易受空气中温度、湿
度、压强等因素的影响
,
其中受温度的影响较大,如温度每升高
1
℃
,
声速
增加约
0. 6
米
/
秒
。
如果测距精度要求很高, 则应通过温度补偿的方法加
以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度
T
时
,
超
声波传播速度
V
的计算公式为:V = 331.45 + 0.607T, 声速确定后, 只要测
得超声波往返的时间,即可求得距离。
资源评论













