






arXiv:0803.0811v3 [cs.NA] 8 Jan 2009
1
Subspace Pursuit for Compressive Sensing Signal
Reconstruction
Wei Dai and Olgica Milenkovic
Department of Electrical and Computer Engineering
University of Illinois at Urbana-Champaign
Abstract—We propose a new method for reconstruction of
sparse signals with and without noisy perturbations, termed the
subspace pursuit algorithm. The algorithm has two important
characteristics: low computational complexity, comparable to
that of orthogonal matching pursuit techniques when applied
to very sparse signals, and reconstruction accuracy of the same
order as that of LP optimization methods. The presented analysis
shows that in the noiseless setting, the proposed algorithm can
exactly reconstruct arbitrary sparse signals provided that the
sensing matrix satisfies the restricted isometry property with a
constant parameter. In the noisy setting and in the case that
the signal is not exactly sparse, it can be shown that the mean
squared error of the reconstruction is upper bounded by constant
multiples of the measurement and signal perturbation energies.
Index Terms—Compressive sensing, orthogonal matching pur-
suit, reconstruction algorithms, restricted isometry property,
sparse signal reconstruction.
I. INTRODUCTION
Compressive sensing (CS) is a sampling method closely
connected to transform coding which has been widely used
in modern communication systems involving large scale data
samples. A transform code converts input signals, embedded
in a high dimensional space, into signals that lie in a space
of significantly smaller dimensions. Examples of transform
coders include the well known wavelet transforms and the
ubiquitous Fourier transform.
Compressive sensing techniques perform transform cod-
ing successfully whenever applied to so-called compressible
and/or K-sparse signals, i.e., signals that can be represented by
K ≪ N significant coefficients over an N -dimensional basis.
Encoding of a K-sparse, discrete-time signal x of dimension
N is accomplished by computing a measurement vector y that
consists of m ≪ N linear projections of the vector x. This
can be compactly described via
y = Φx.
Here, Φ represents an m × N matrix, usually over the field
of real numbers. Within this framework, the projection basis
is assumed to be incoherent with the basis in which the signal
has a sparse representation [1].
Although the reconstruction of the signal x ∈ R
N
from the
possibly noisy random projections is an ill-posed problem, the
This work is supported by NSF Grants CCF 0644427, 0729216 and the
DARPA Young Faculty Award of the second author.
Wei Dai and Olgica Milenkovic are with the Department of Electrical and
Computer Engineering, University of Illinois at Urbana-Champaign, Urbana,
IL 61801-2918 USA (e-mail: weidai07@ uiuc.edu; milenkov@uiuc.edu).
strong prior knowledge of signal sparsity allows for recovering
x using m ≪ N projections only. One of the outstanding
results in CS theory is that the signal x can be reconstructed
using optimization strategies aimed at finding the sparsest
signal that matches with the m projections. In other words,
the reconstruction problem can be cast as an l
0
minimization
problem [2]. It can be shown that to reconstruct a K-sparse
signal x, l
0
minimization requires only m = 2 K random pro-
jections when the signal and the measurements are noise-free.
Unfortunately, the l
0
optimization problem is NP-hard. This
issue has led to a large body of work in CS theory and practice
centered around the design of measurement and reconstruction
algorithms with tractable reconstruction complexity.
The work by Donoho and Candès et. al. [1], [3], [4], [5]
demonstrated that CS reconstruction is, indeed, a polynomial
time problem – albeit under the constraint that more than
2K measurements are used. The key observation behind these
findings is that it is not necessary to resort to l
0
optimization
to recover x from the under-determined inverse problem; a
much easier l
1
optimization, based on Linear Programming
(LP) techniques, yields an equivalent solution, as long as the
sampling matrix Φ satisfies the so called restricted isometry
property (RIP) with a constant parameter.
While LP techniques play an important role in designing
computationally tractable CS decoders, their complexity is
still highly impractical for many applications. In such cases,
the need for faster decoding algorithms - preferably operating
in linear time - is of critical importance, even if one has
to increase the number of measurements. Several classes of
low-complexity reconstruction techniques were recently put
forward as alternatives to linear programming (LP) based
recovery, which include group testing methods [6], and al-
gorithms based on belief propagation [7].
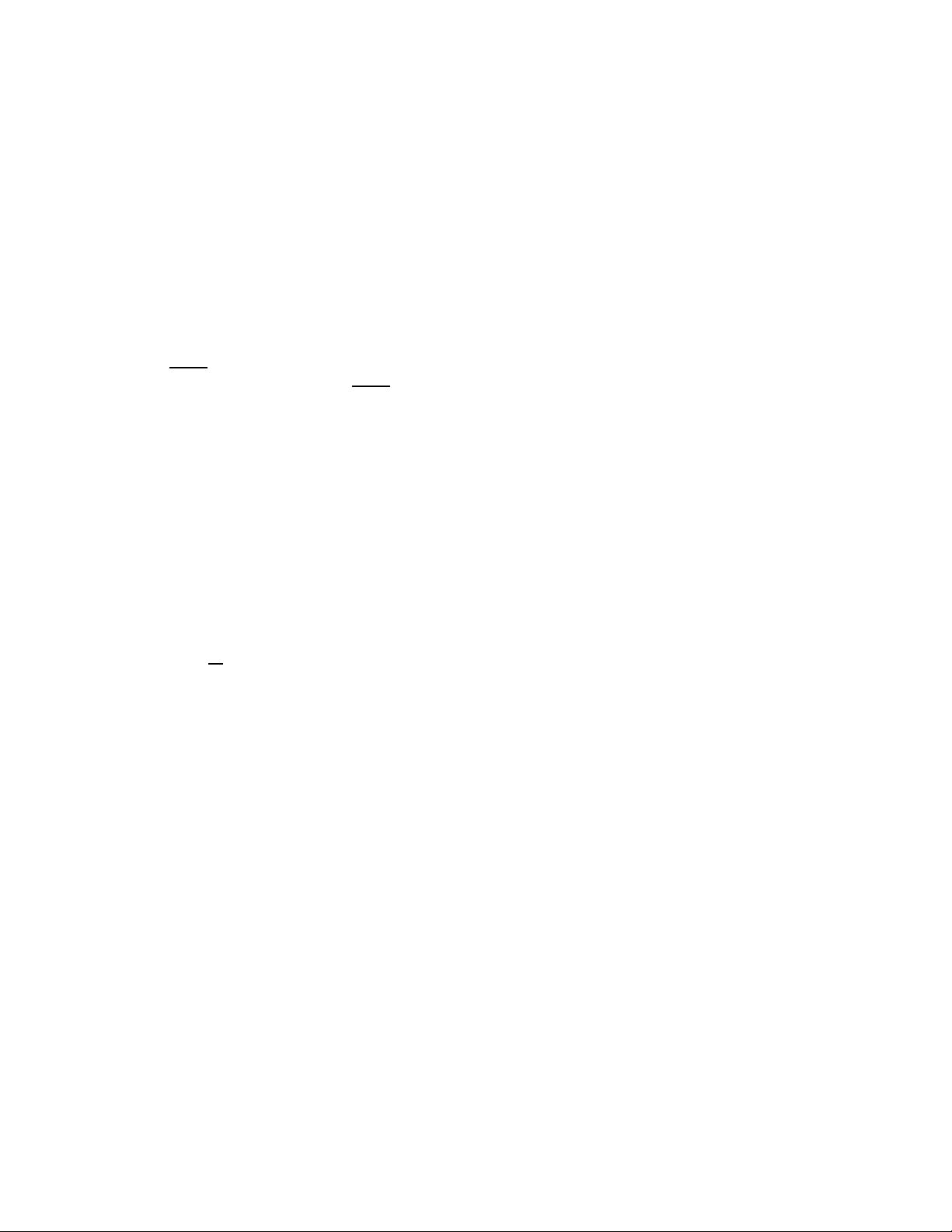
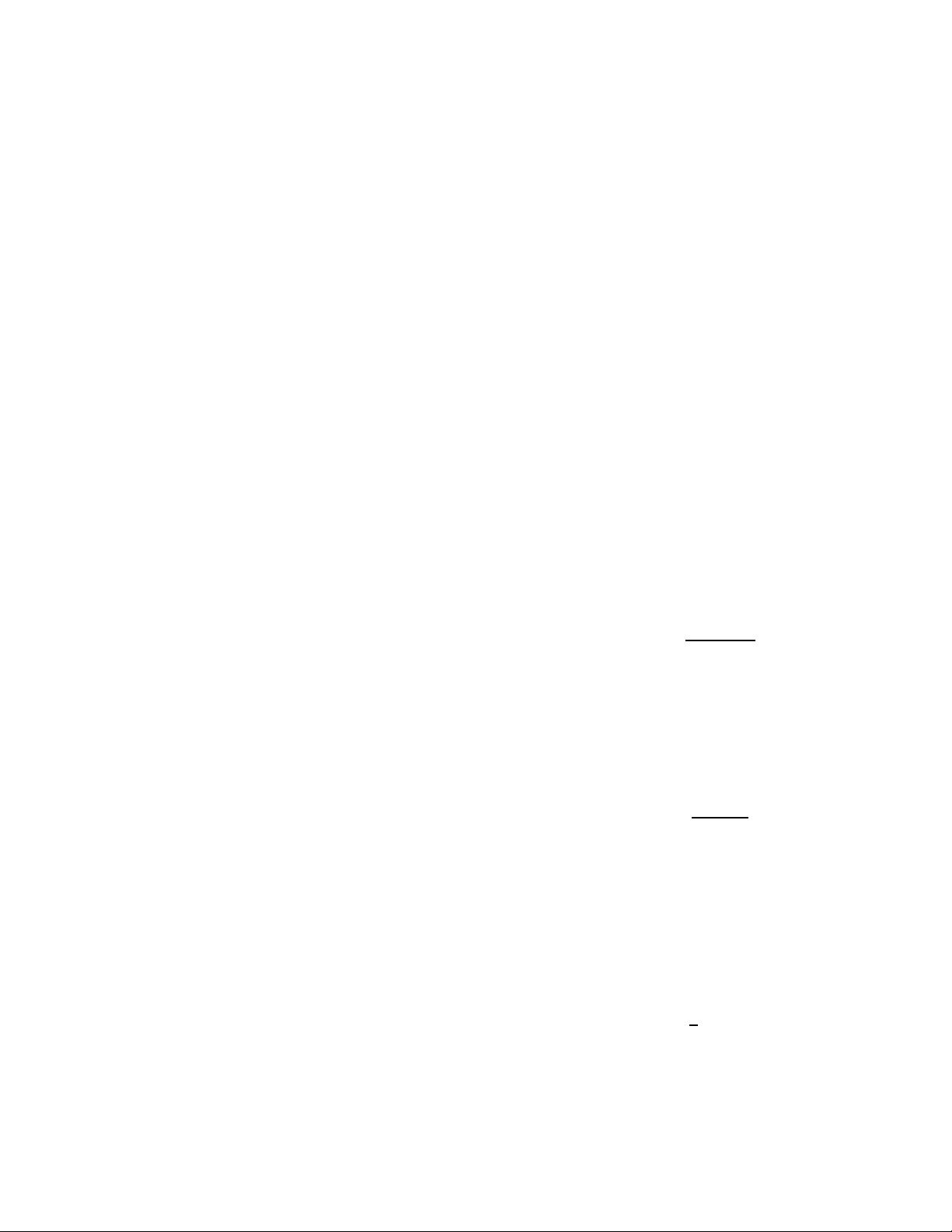
Recently, a family of iterative greedy algorithms received
significant attention due to their low complexity and simple
geometric interpretation. They include the Orthogonal Match-
ing Pursuit (OMP), the Regularized OMP (ROMP) and the
Stagewise OMP (StOMP) algorithms. The basic idea behind
these methods is to find the support of the unknown signal
sequentially. At each iteration of the algorithms, one or several
coordinates of the vector x are selected for testing based
on the correlation values between the columns of Φ and
the regularized measurement vector. If deemed sufficiently
reliable, the candidate column indices are subsequently added
to the current estimate of the support set of x. The pursuit
algorithms iterate this procedure until all the coordinates in

















- 1
- 2
- 3
- 4
前往页