




8
Robust Control of a Mass-Damper-Spring
System
In this chapter we consider the design of a robust control system for a sim-
ple, second-order, mechanical system, namely a mass-damper-spring system.
The mass-damper-spring system is a common control experimental device fre-
quently seen in an undergraduate teaching laboratory. As the first case study
considered in this book, we show in detail the design of three different con-
trollers for this system and present robust stability and robust performance
analysis of the corresponding closed-loop systems, respectively. In order to
keep the designs simple we take into account only the structured (parametric)
perturbations in the plant coefficients. In this design example we give some in-
formation for several basic commands from the Robust Control Toolbox that
are used in the analysis and design in this and subsequent case studies. To
illuminate in a clear way the implementation of the most important Robust
Control Toolbox commands, we include in the chapter all files used in compu-
tations related to the analysis and design of the mass-damper-spring control
system. It is hoped that this chapter may serve as a tutorial introduction not
only to robust control systems analysis and design but also to the use of the
Robust Control Toolbox.
8.1 System Model
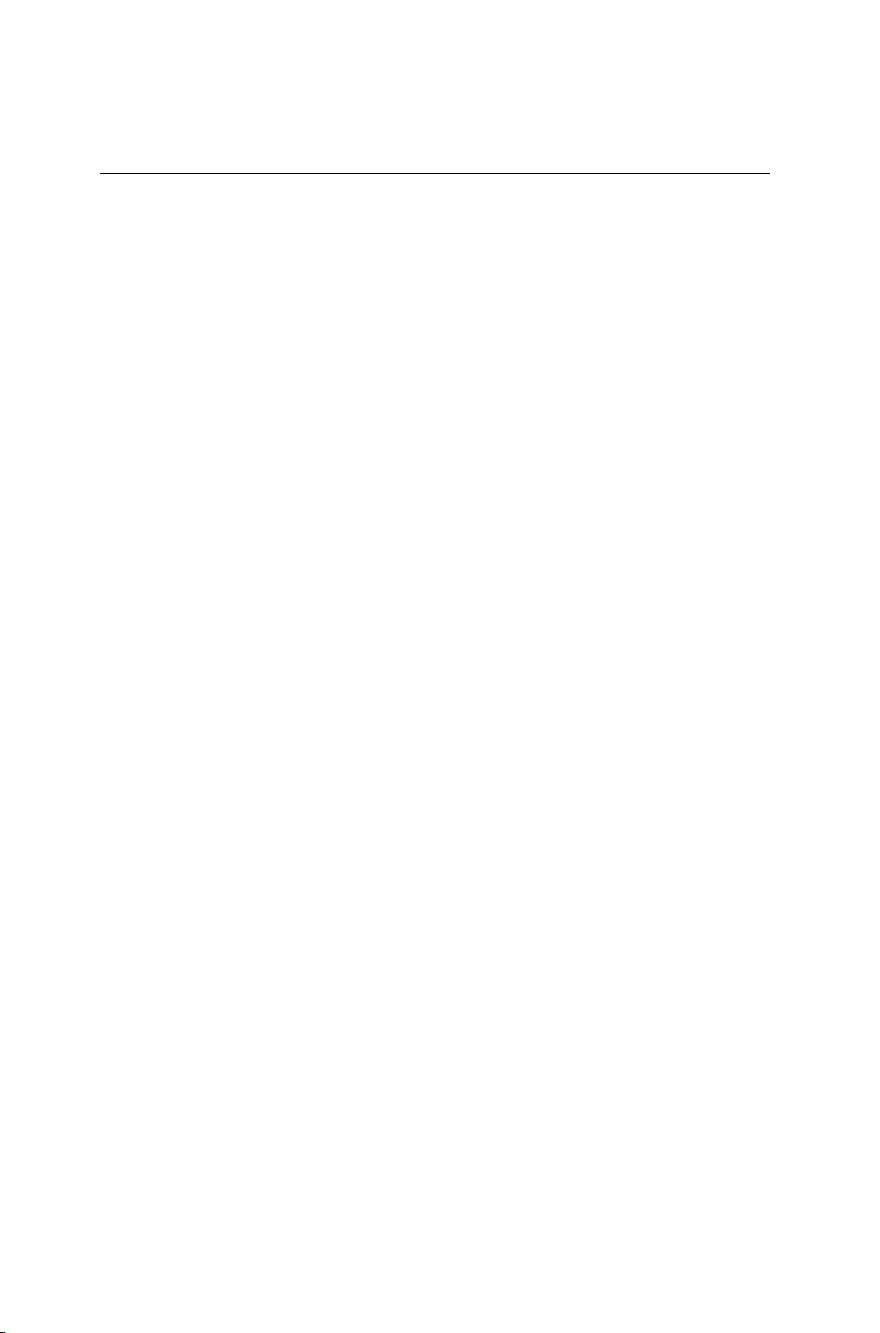
The one-degree-of-freedom(1DOF) mass-damper-spring system is depicted in
Figure 8.1.
The dynamics of such a system can be described by the following 2nd-order
differential equation, by Newton’s Second Law,
m¨x + c ˙x + kx = u
where x is the displacement of the mass block from the equilibrium position
and u = F is the force acting on the mass, with m the mass, c the damper
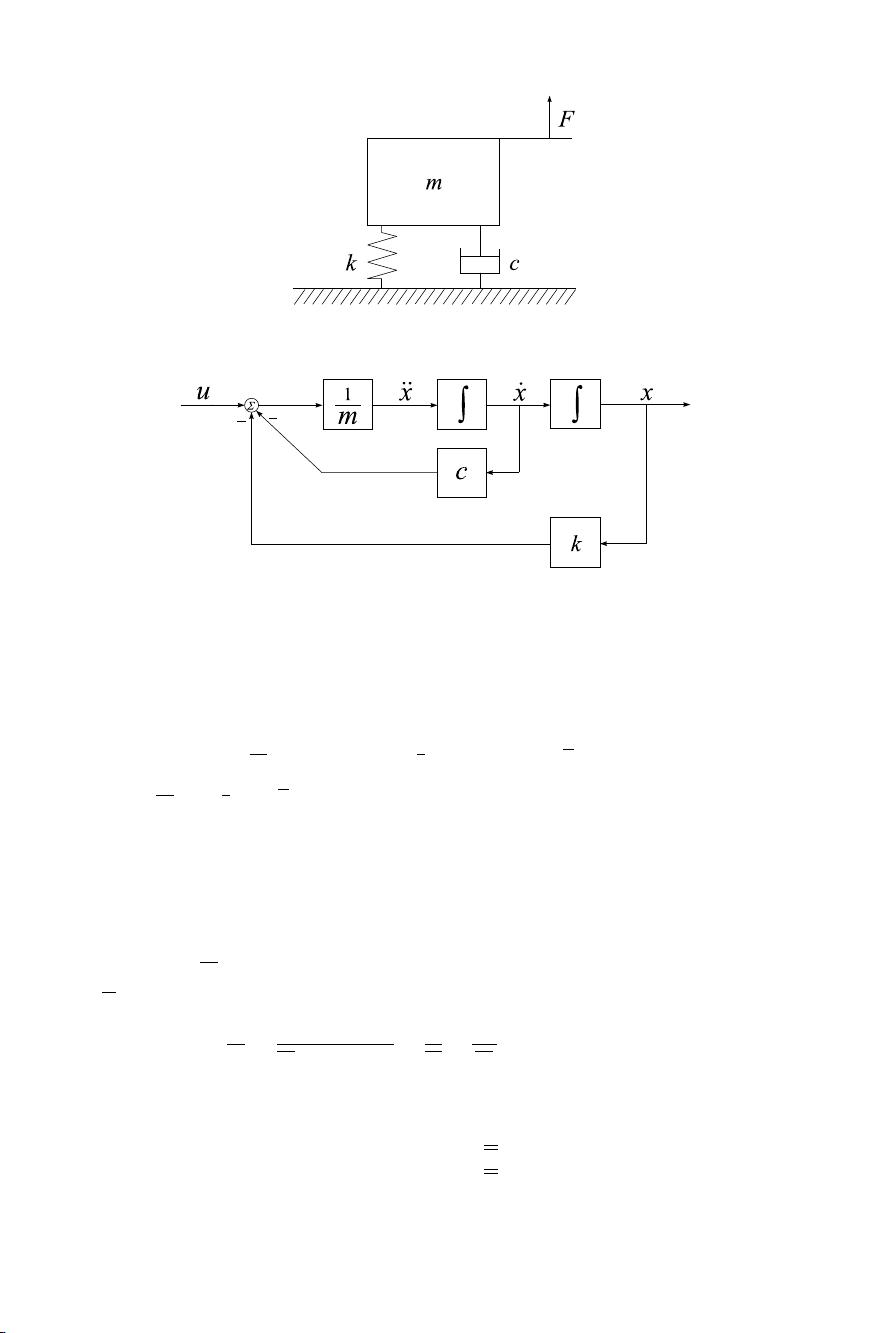
constant and k the spring constant. A block diagram of such a system is shown
in Figure 8.2.


















- 1
- 2
- 3
- 4
前往页