IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 20, NO. 6, DECEMBER 2012 1147
Short Papers
TSK Fuzzy CMAC-Based Robust Adaptive Backstepping
Control for Uncertain Nonlinear Systems
Chih-Min Lin and Hsin-Yi Li
Abstract—A Takagi–Suegeno–Kang (TSK) fuzzy cerebellar-model-
articulation-controller-based robust adaptive backstepping (TFCRAB)
control system is proposed for the uncertain nonlinear systems. This
TFCRAB control system is composed of a novel TSK fuzzy cerebellar model
articulation controller (TFC) and a robust compensator. The proposed TFC
is a generalization of a TSK fuzzy system, a fuzzy neural network, and a
conventional cerebellar-model-articulation-controller. It is used as the prin-
cipal tracking controller to mimic an ideal backstepping controller (IBC).
The parameters of TFC are tuned online by the derived adaptation laws
based on the Lyapunov stability theorem. The robust compensator is de-
signed to dispel the approximation error between the TFC and the IBC so
that the asymptotic stability of the closed-loop system can be guaranteed.
Finally, the proposed control system is applied to control a Duffing–Holmes
chaotic system and a voice coil motor. From the simulation and experimen-
tal results, it is verified that the proposed TFCRAB control scheme can
achieve favorable tracking performance and that even the system models
of the controlled systems are unknown.
Index Terms—Backstepping control, chaotic system, cerebellar model
articulation controller (CMAC), Takagi–Suegeno–Kang (TSK) fuzzy sys-
tem, voice coil motor (VCM).
I. INTRODUCTION
In recent years, several research works have been devoted to the
fuzzy control or fuzzy neural network control of nonlinear systems
[1]–[5]. The fuzzy neural networks have been proposed by combining
a fuzzy rule base system with a neural network [2], [3], and a lot of
applications using fuzzy neural networks have been presented [4], [5].
This study aims to propose a more generalizing fuzzy neural network
and then applies it to control the uncertain nonlinear systems. Recently,
the backstepping control has been proposed for the nonlinear systems
[6]. Moreover, the fuzzy and neural backstepping control designs have
been presented to deal with the model-free control systems [4], [7]–[9].
The cerebellar model articulation controller (CMAC) can be thought
of as a learning mechanism that imitates a human brain [10], [11]. The
advantages of using CMAC in place of neural networks in some appli-
cations have been presented [12], [13], but the major drawback of the
existing CMACs is that their output weights are constants. Although
many CMACs have been proposed, in contrast with fuzzy neural net-
works, these CMACs are not related to a fuzzy rule base.
The Takagi–Suegeno–Kang (TSK)-type fuzzy model is a successful
approach that deals with nonlinear system identification [14]–[16]. The
TSK model has attracted a great deal of attention from the fuzzy model-
Manuscript received August 17, 2011; revised December 21, 2011; accepted
February 12, 2012. Date of publication March 20, 2012; date of current version
November 27, 2012. This work was supported by the National Science Council
of China under Grant NSC 98-2221-E-155-058-MY3.
The authors are with the Department of Electrical Engineering, Yuan
Ze University, Tao-Yuan 320, Taiwan (e-mail: cml@saturn.yzu.edu.tw;
s988506@mail.yzu.edu.tw).
Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TFUZZ.2012.2191789
ing community because of its good performance in variousapplications.
A great advantage of TSK-type fuzzy model is its representative power,
which can describe a nonlinear system using sufficient rules and train-
ing data. Since the TSK fuzzy system has good capability for nonlinear
system approximation and the CMAC has good generalization and fast
learning, this paper aims to propose a more generalizing network re-
ferred to as TSK fuzzy CMAC (TFC). The rule base of this new TFC
contains the CMAC structure with layers and blocks; therefore, this
CMAC-type TSK fuzzy system is a generalization of the conventional
TSK fuzzy system [14]–[16]. Moreover, in some special cases, this
TFC can be also reduced to a fuzzy neural network [2]–[5] and a con-
ventional CMAC [10]–[13]. This TFC has several advantages, such as
good generalization, rapid learning, and rapid convergence; thus, it is
more suitable for the control of uncertain nonlinear system.
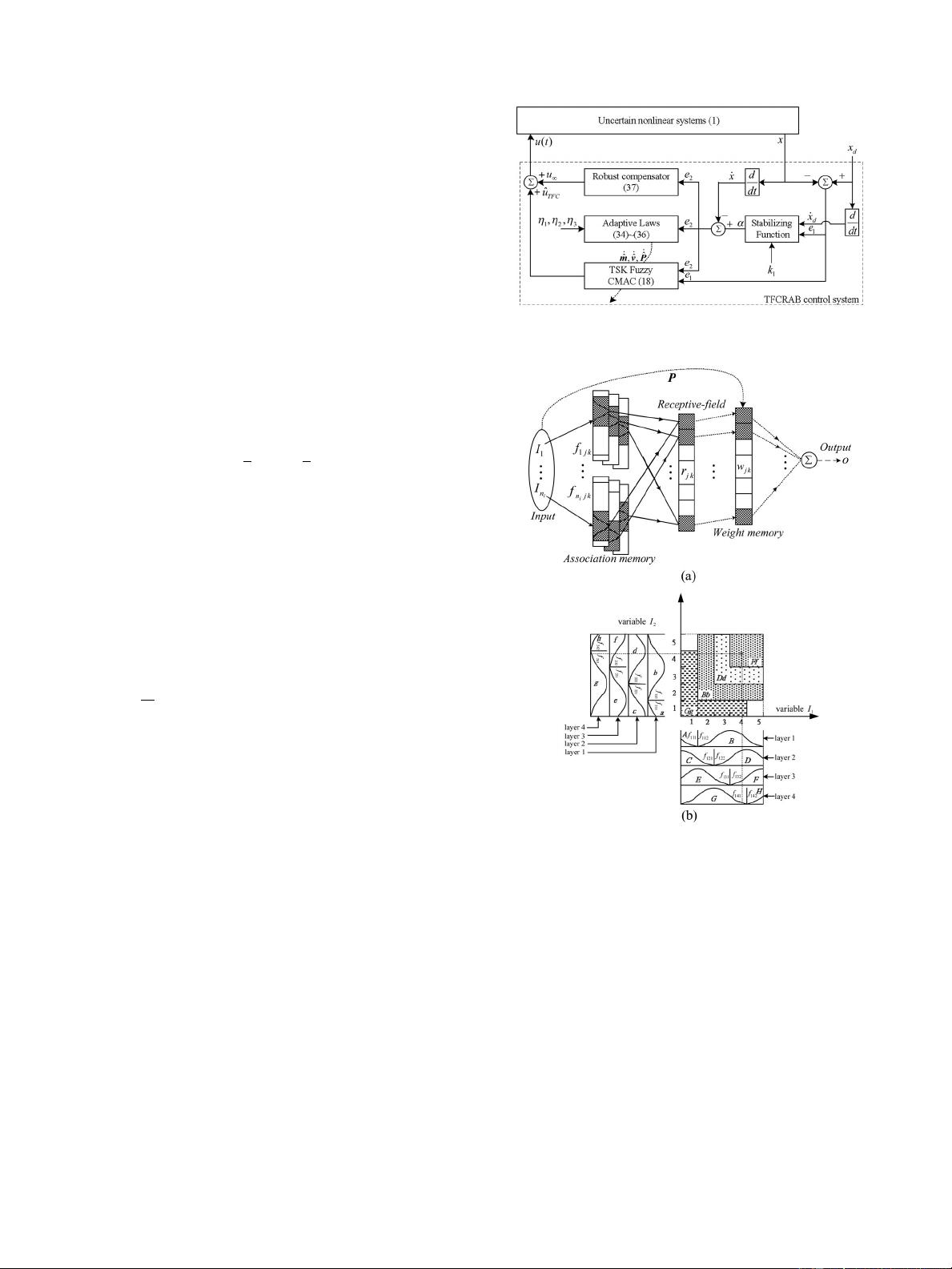
By using the developed TFC, a TFC-based robust adaptive backstep-
ping (TFCRAB) control system is proposed for the uncertain nonlinear
systems. In this control scheme, a TFC is used to mimic an ideal
backstepping controller (IBC), and the parameters of TFC are tuned
online by the derived adaptive laws. Moreover, a robust compensator
is designed to efficiently suppress the influence of approximation error
between the IBC and the TFC so that robust tracking performance can
be achieved. Finally, two uncertain nonlinear systems, i.e., a Duffing–
Holmes chaotic system and a voice coil motor (VCM), are used to
verify the effectiveness of the proposed TFCRAB control system.
II. P
ROBLEM FORMULATION
Consider a class of nth-order uncertain nonlinear systems described
by the following equation:
x
(n )
(t)=f(x; t)+g(x; t)u(t)+d(x; t) (1)
where f(x; t) and g(x; t) represent the smooth nonlinear uncertain
functions that are assumed to be bounded, u(t) ∈denotes the control
input, d(x; t) denotes an unknown but bounded external uncertain dis-
turbance, and x =[x
1
, ...,x
n
]
T
=[x, ...,x
(n −1)
]
T
∈
n
denotes
a state vector of a system that is assumed to be available for measure-
ment.
The uncertain nonlinear system (1) can be reformulated as
x
n
(t)=f
0
(x; t)+Δf(x; t)+[g
0
+Δg(x; t)]u(t)+d(x; t)
= f
0
(x; t)+g
0
u(t)+d
0
(x; t) (2)
where f
0
(x; t) and g
0
denote the nominal parts, and Δf (x; t) and
Δg(x; t) denote the unknown uncertainties of f (x; t) and g(x; t),
respectively; d
0
(x; t) is referred to as the lumped uncertainty, which is
defined as d
0
(x; t)=Δf(x; t)+Δg(x; t)u(t)+d(x; t). For system
(2) to be controllable, it is necessary that the constant g
0
=0for all
x.Sinceg(x; t) is continuous, without loss of generality, it is assumed
that 0 <g
0
< ∞ for all x.
The tracking control problem of this system is to find a suitable
control law so that the state trajectory x can track a reference command
x
d
=[x
d
, ...,x
(n −1)
d
]
T
closely; it implies lim
t→∞
x
d
− x→0.
If all the parameters of f
0
(x; t), g
0
,andd
0
(x; t) in (2) are clearly
known, the design of the IBC can be as described step-by-step in the
following section [6]. To illustrate the backstepping control technology,
a second-order system is presented next, and a similar design process
can be extended to any nth-order system.
1063-6706/$31.00 © 2012 IEEE
Authorized licensed use limited to: Yuan Ze University. Downloaded on July 15,2020 at 09:09:50 UTC from IEEE Xplore. Restrictions apply.