


——
—
CMA盲均衡算法研究
姓名 学号
宋政育
08120153
——
—
1.盲均衡概述
1.1 均衡器分类
均衡是通信系统中的一项重要技术, 不仅应用于模拟通信, 也应用于数字通
信。在数字通信中,由于信道的特性变化,会造成码间干扰。通过均衡,可以补
偿信道特性的变化, 减小或消除码间干扰。 均衡通常在接收机完成。 均衡器分为
两种方式, 一是频域均衡, 二是时域均衡。 频域均衡是使整个系统的频率传递函
数满足无失真传递的条件。 时域均衡是直接从时间响应出发, 使整个系统的冲激
响应满足无码间干扰的条件。 频域均衡的条件是比较严格的, 而满足奈奎斯特整
形定理的要求, 即仅仅在判决点满足无码间干扰的条件相对宽松一些。 所以在数
字通信中,一般采用时域均衡。
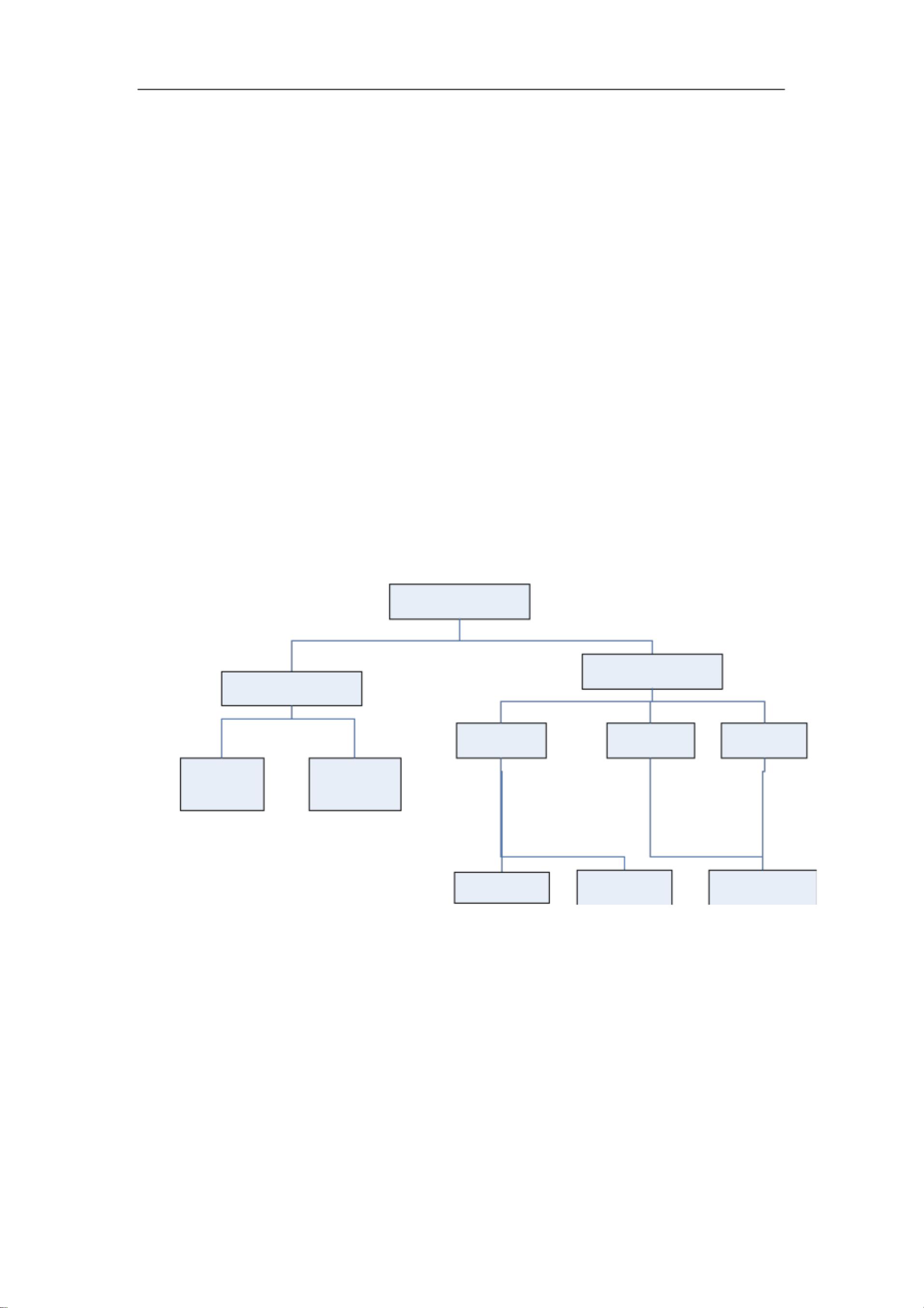
时域均衡器分为两大类,一是线性均衡器,二是非线性均衡器。图 1.1 表示
了均衡器的分类框图。
均衡器
线性均衡器
非线性均衡器
判决反馈均
衡器
最大似然序
列估计
最大似然符
号检测器
横向滤波器 格型滤波器 横向信道估计
横向滤波
器
格型滤波
器
图 1.1 均衡器的结构分类
1.2 盲均衡技术
尽管理论上存在理想的基带传输特性, 但是在实际应用由于中无线信道的时
变特性,在抽样时刻上总是存在一定的码间干扰, 从而导致系统性能的下降, 误
码率显著增大。 理论和实践都表明, 在基带系统中插入一种滤波器能减少码间干
扰的影响。 这种起补偿作用的滤波器统称为均衡器。 在实际应用中有许多问题不
——
—
能用固定系数的均衡器解决, 因为我们没有充足的信息去设计固定系数的数字滤
波器,或设计规则会在滤波器正常运行时改变。 绝大多数这些应用都可以用特殊
的智能滤波器,即常说的自适应滤波器来成功解决。自适应滤波器显著特征是:
它在工作过程中不需要用户的干预就能改变响应,进而改善性能。
系数可变的自适应均衡器可以分为两类:基于导频的估计方法和盲估计方
法。第一种方法利用数据序列中的已知数据 (可以是离散的或连续的) 得到导频
位置处的信道响应, 然后利用有关内差算法得到整个频域信道的响应, 这种方法
简单,运算量小,但需要发送已知的导频信息,降低了系统效率。而盲估计和跟
踪方法利用了接收数据的统计特性来实现信道的估计和跟踪, 如利用子空间分解
算法等,相对于基于导频的估计和跟踪算法, 盲算法提高了系统效率, 但极大地
增加了运算量。
盲均衡是一种在信道畸变相当严重的条件下, 不借助训练序列, 仅根据接受
到的信号序列本身对信道进行自适应均衡的方法。 与普通的均衡器相比, 盲均衡
具有收敛域大,应用范围广的特点。
1.3 盲均衡算法与分类
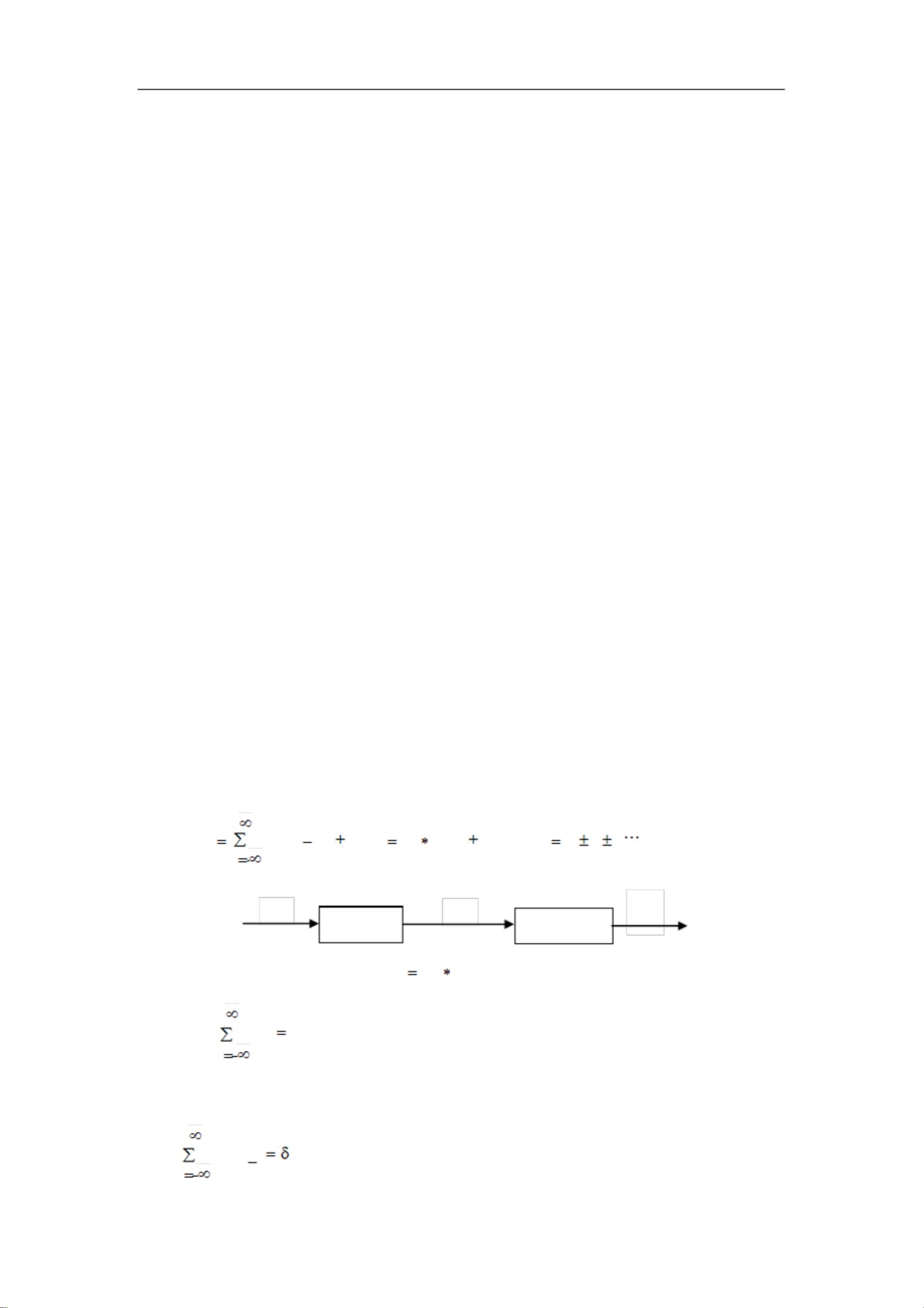
1.3.1 盲均衡概述
含有盲均衡功能的接收系统如图所示。 其中信道包括收发部分的滤波器以及
空间传播媒体,其时变冲激响应序列
{ }
n
h
未知。信道输出信号形式为:
,2,1,0),()()()()( nnnnshnnknshnr
n
k
k
为了保证无噪信道输出
( ) ( )
n
u n h s n
方差不变,通常采用自动增益控制技
术,使得
2
1
k
k
h
。令{ }
i
w 为一个理想逆滤波器的冲激响应序列,他与信道冲
激响应序列 { }
n
h 之间满足逆关系,即
ni n i
i
w h
)(
?
ns
r(n)
s(n)
信道 h
n
盲均衡器
——
—
这样,在发射信号通过信道传输后,首先接入这个逆滤波器,其输出为(先
不考虑噪声因素):
( ) ( ) ( ) ( )
i i
l i l
i il l
w r n i s n l w h s n l s n
。
在实际应用中,理想逆滤波器
}{
i
w
通常采用长度为 2L+1 的有限抽头,这样
滤波器输出为
?
( ) ( )
L
i
i L
y n ws n i
这就是众所周知的用横向滤波器实现逆滤波器的形式。由于逆滤波器截断,
必然会带来残余码间干扰,进一步分析可知: ( ) ( ) ( )y n s n v n ,其中
? ?
( ) [ ( ) ( )] ( ), 0
i i i
i
v n w n w n s n i w i L
称为卷积噪声,也就是残余码间干扰。以此作为误差信号去调节逆滤波器就得
到盲均衡器。
1.3.2 盲均衡算法分类
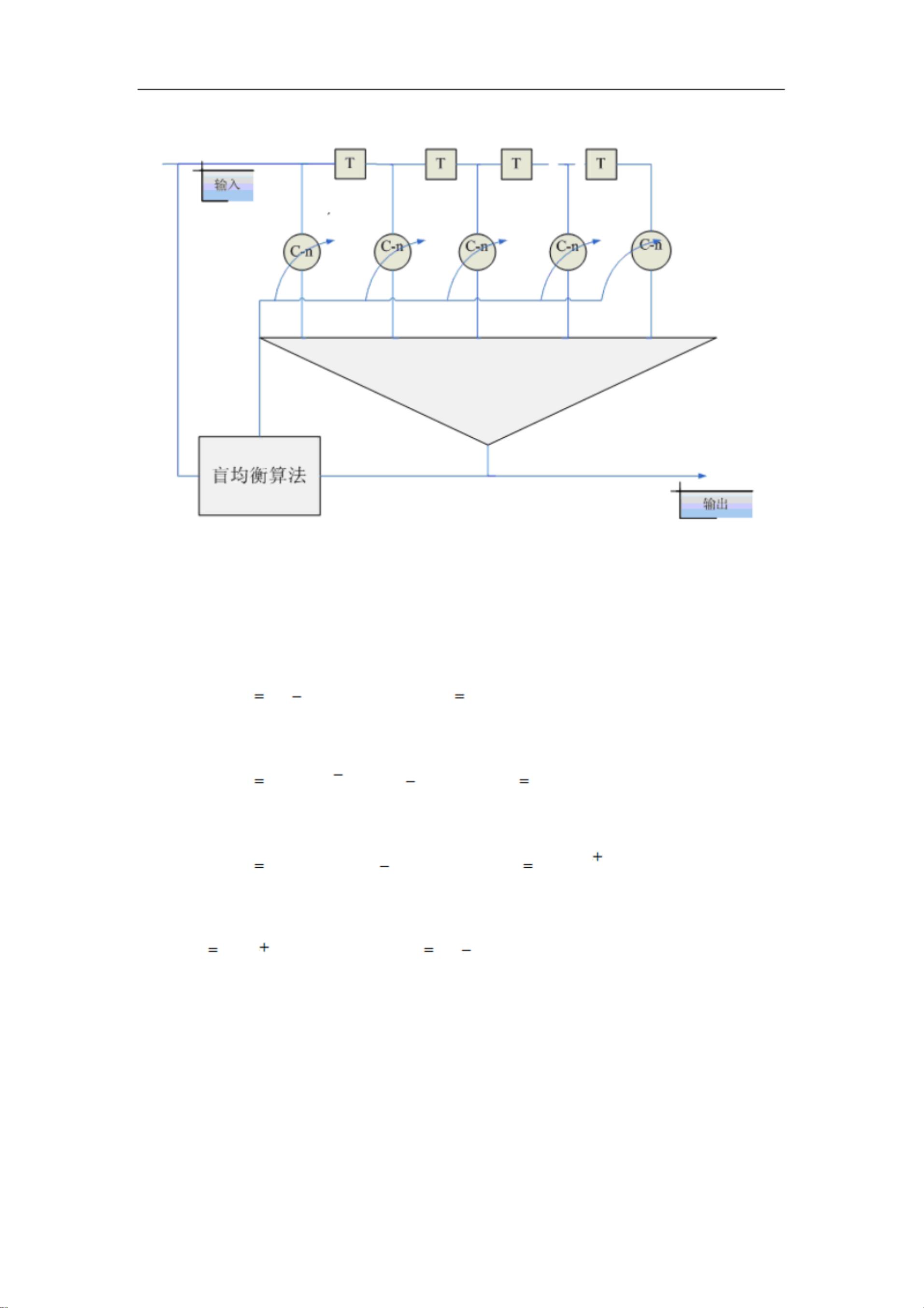
考虑一个有 2N+1 抽头的线性均衡器如下图所示。其中
N
m
i n i
i N
Zn C y
,式中 m 和 n 取整数 ,
n
y 为第 NT 时刻均衡器的输出参数,
m
i
C
为第 m 次高速后第 i 个抽头的增益系数, T 为发送端信号的符号周期。
算法的一般形式为
1
0
( )
m m
i i n i n
C C y f Z ,这里
0
是迭代步长, f()是起误
差控制的函数,其选取关系到算法的收敛性。
——
—
图 1.2 整数抽头均衡盲均衡器
Sato 提出的盲均衡算法表达式为
( ) . ( )
n n n
f Z Z r s i g n Z,其中
2
( )/ | |
n n
r E a E a ;
Godard 给出的盲均衡算法表达式为
2
( ) | | ( | | )
K K
n n n n K
f Z Z Z Z R ,其中
2
| | / | |
K k
K n n
R E a E a ;
Serra 给出的盲均衡算法表达式为
( ) | | . ( ) .
k
n n n K n
f Z Z s i g n Z R Z,其中
1 2
| | / ( )
K
K n n
R E a E a ;
Benvenisete-Goursat 提出的均衡算法表达式为
1 2
( ) | |
n n n n
f Z K e K e e ,其中
n n n
e Z a ;
以上各种算法的盲均衡器总的要求是快速跟踪信道的变化,快速收敛,且收
敛以后的剩余误差要小。
2. CMA 算法
2.1 CMA 算法的原理
利用自适应滤波算法,合理的人工制造一个“期望响应”来代替缺失的“期

















- 1
- 2
前往页