1
Tor-Inge Johannessen Eriksen – TTK4155 Industrial and Embedded Computer Systems Design – Lab lecture 5
TTK4155
Industrial and Embedded Computer Systems Design
Lab lecture 5
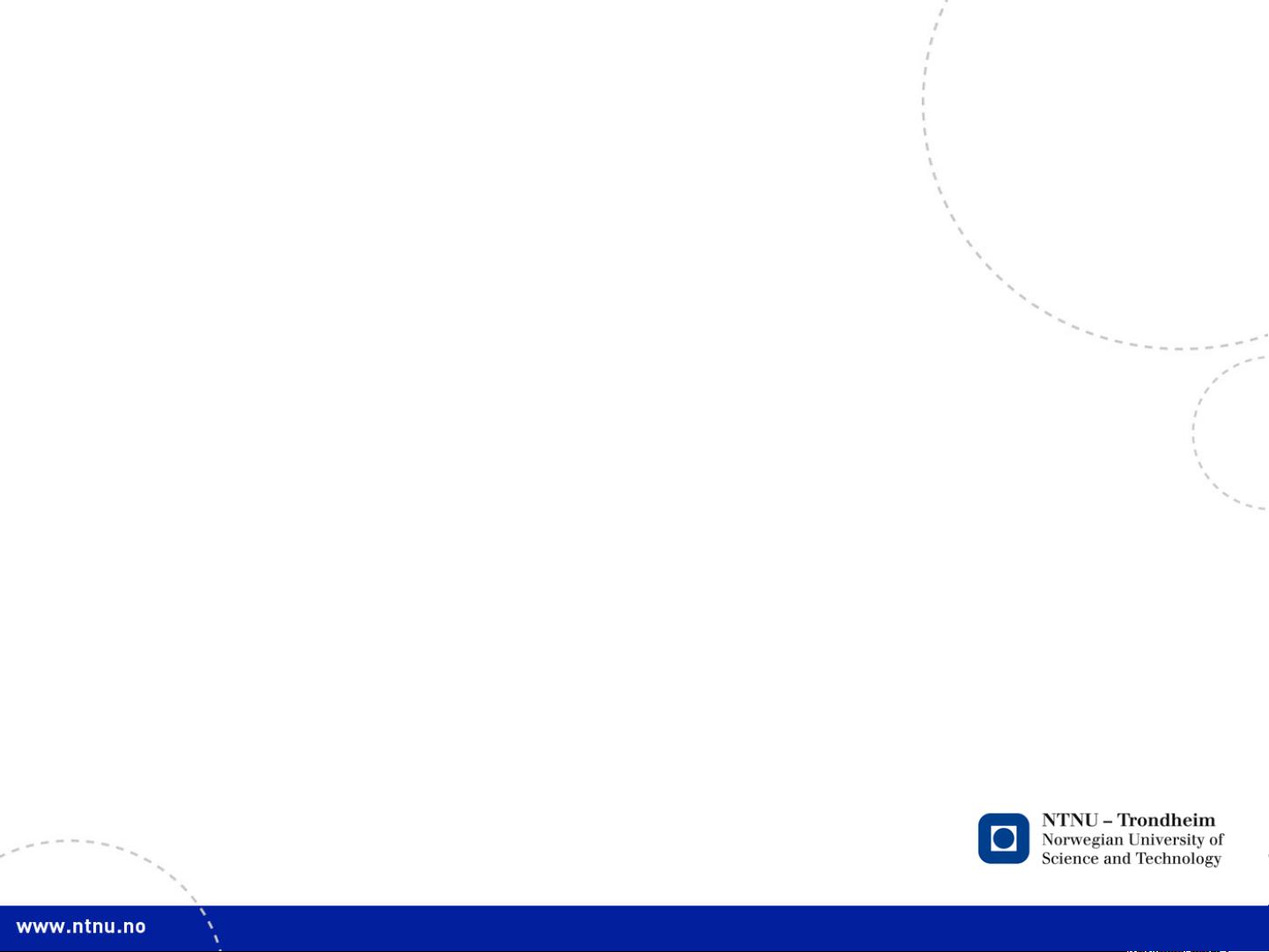
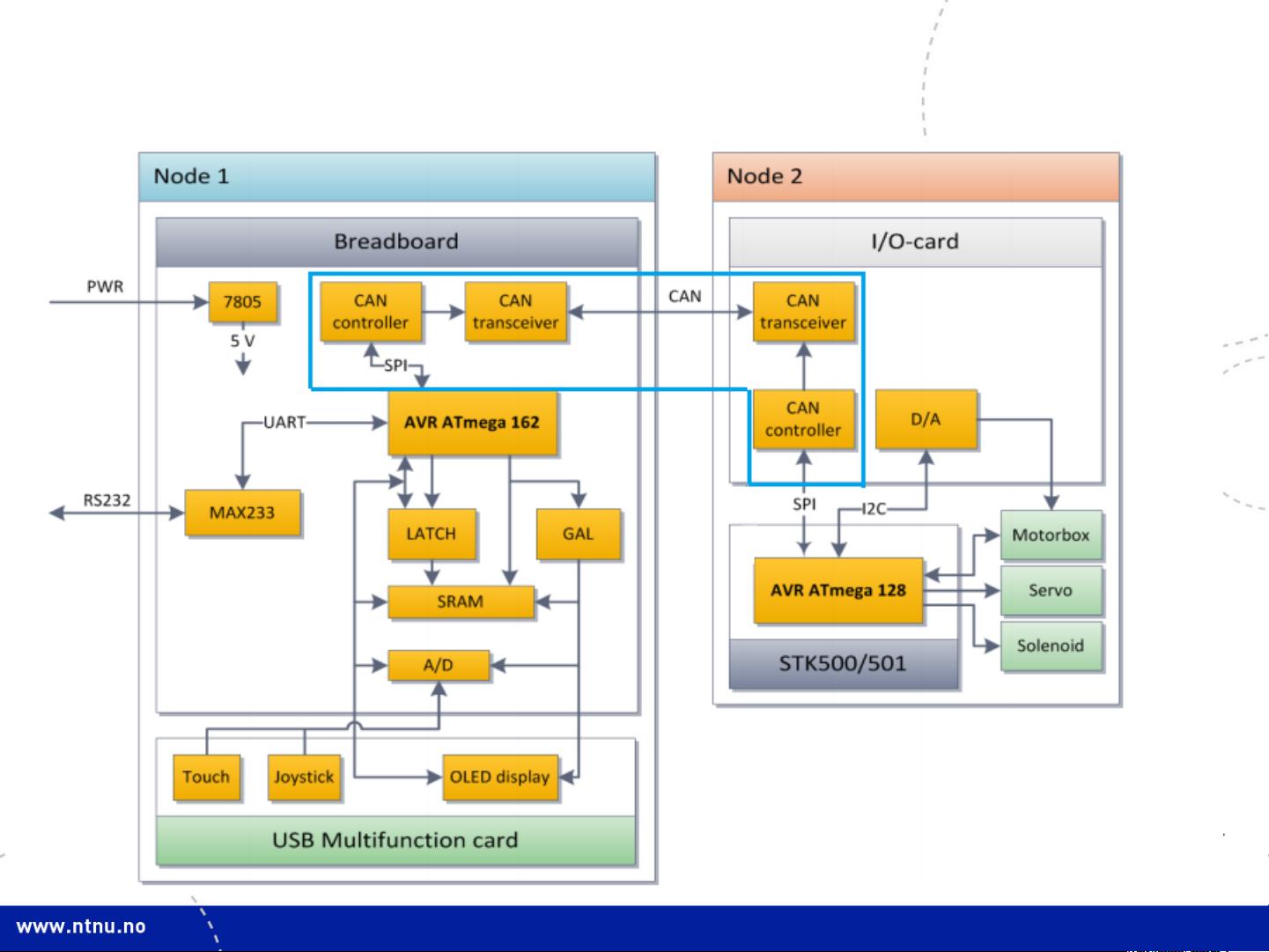
• CAN bus
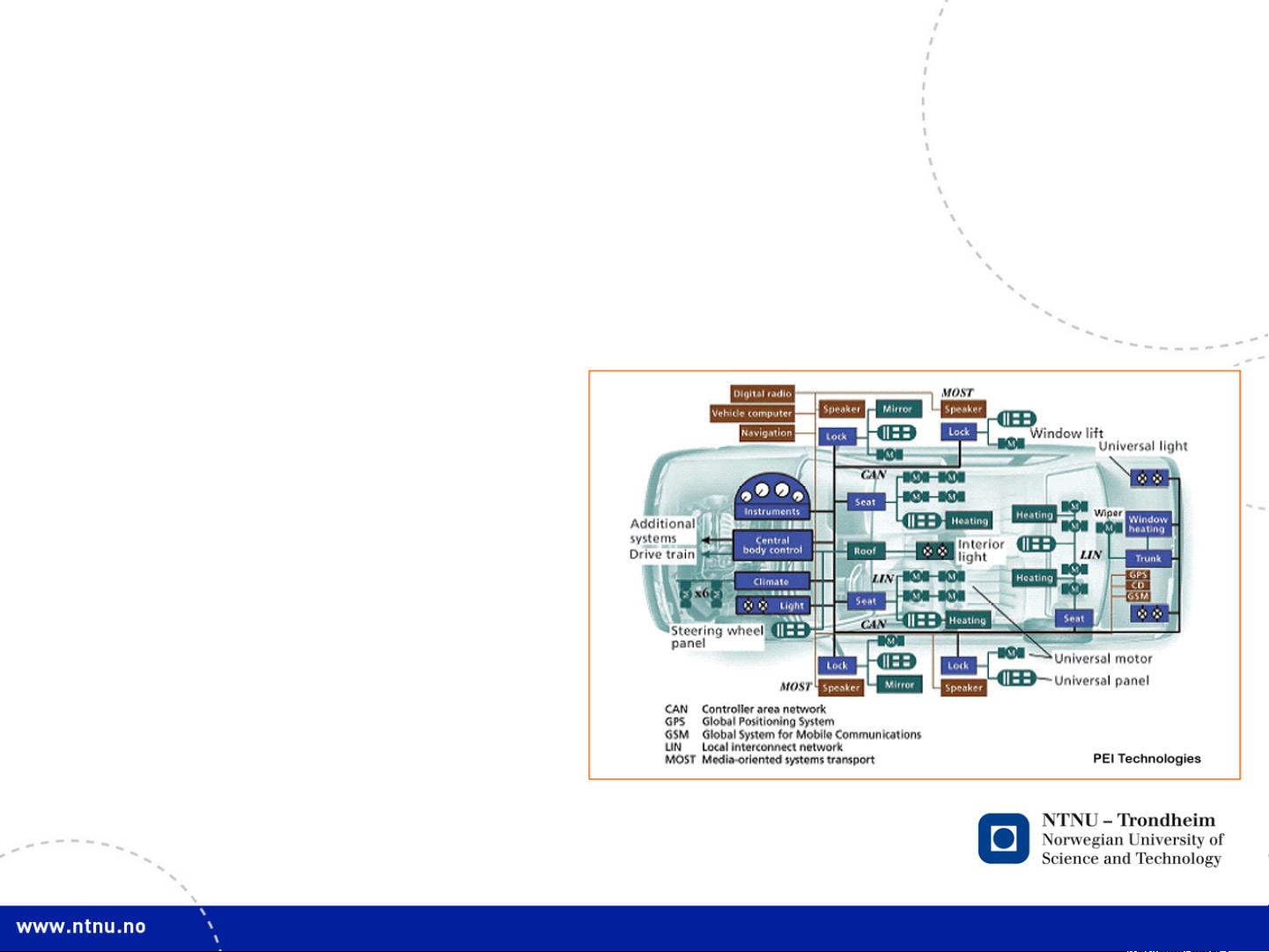
• CAN controller and transceiver
• SPI bus

 SPI.zip.zip (3个子文件)
SPI.zip.zip (3个子文件)  LabLecture5.pdf 2.65MB MCP2515_CANctr.pdf 991KB
LabLecture5.pdf 2.65MB MCP2515_CANctr.pdf 991KB SPI.c 566B
SPI.c 566B