1
CONTROLLER AREA NETWORK (CAN)
Low-density device: STM32F101xx, STM32F102xx, STM32F103xx mà có bộ nhớ
Flash từ 16 – 32Kbyte
Medium-density device: STM32F101xx, STM32F102xx, STM32F103xx mà có bộ nhớ
Flash từ 64 – 128Kbyte
High-density device: STM32F101xx, STM32F103xx mà có bộ nhớ Flash từ 256 –
512Kbyte
XL-density device: STM32F101xx, STM32F103xx mà có bộ nhớ Flash từ 768Kbyte –
1Mbyte
Connectivity line device: STM32F105xx và STM32F107xx. Vùng này ứng dụng cho
connectivity line và chỉ STM32F103xx performance line
23.1 bxCAN introduce
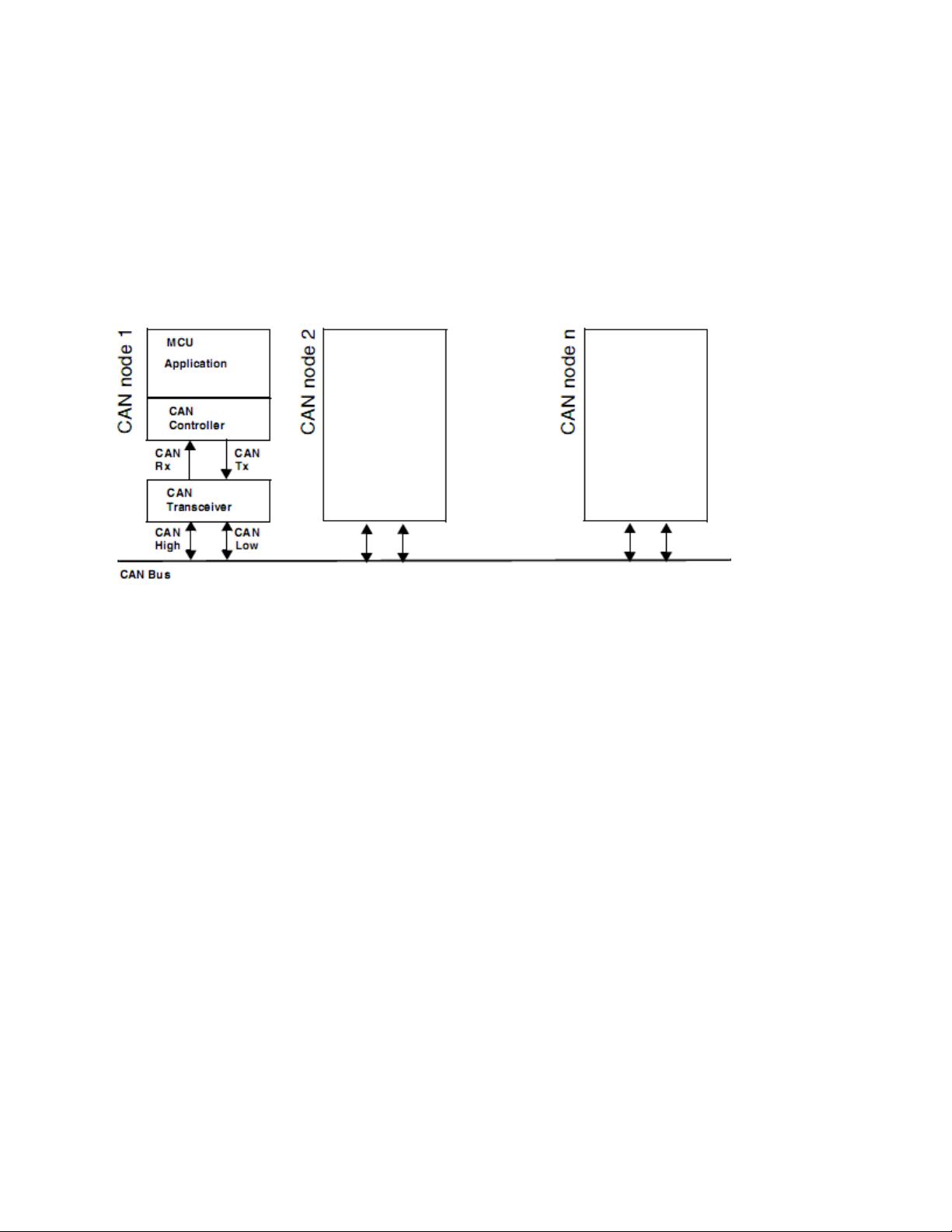
Ngoại vi Basic Extend CAN, có tên là bxCAN, giao tiếp mạng CAN. Nó hỗ trợ giao thức
CAN phiên bản 2.0A và B. Nó được thiết kế để quản lý số lượng các tin nhắn đến
(incoming message) 1 cách hiệu quả với độ nạp CPU tối thiểu nhất. Nó cũng yêu cầu độ
ưu tiên cho việc truyền tin nhắn.
Đối với các ứng dụng safety-critical, thì trình điều khiển CAN cung cấp tất cả các chức
năng phần cứng để hỗ trợ chức năng CAN Time Triggered Communication.
23.2 bxCAN main features
Hỗ trợ giao thức CAN phiên bản 2.0A, B
Tốc độ bit (bit rates) lên đến 1Mbit/s
Hỗ trợ chức năng Time Triggered Communication
Transmission
Có 3 mailbox truyền
Độ ưu tiên truyền có thể cấu hình được
Time Stamp trên SOF transmission
Reception