异步电动机矢量控制系统的仿真研究、
摘 要:
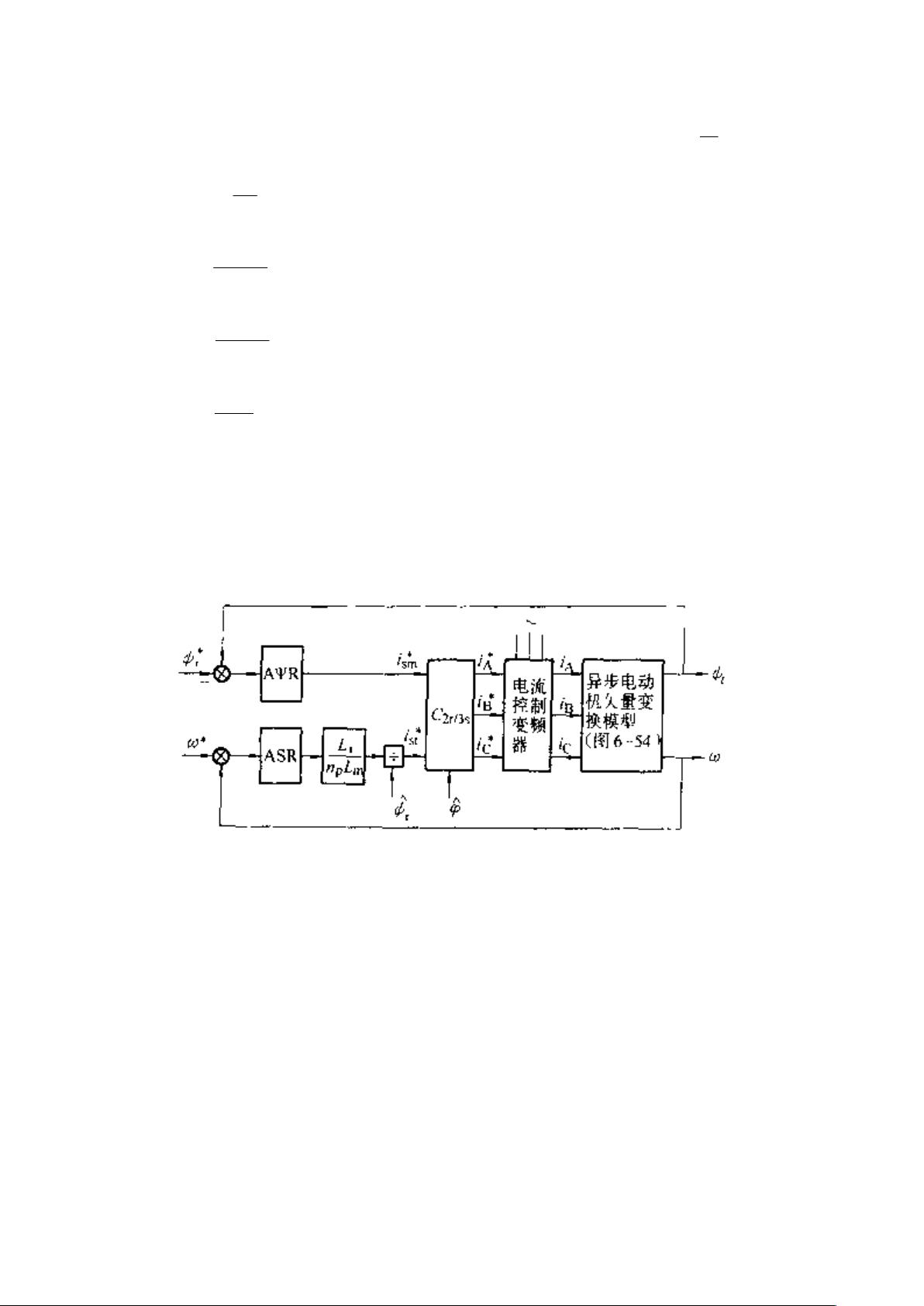
本文根据异步电动机矢量控制的基本原理,基于 Matlab 软件构造了按转子磁场定向的
矢量控制系统的仿真模型。通过仿真试验验证了模型的正确性,结果表明所建立的调速系统
具有良好的动态性能,实现了系统的解耦控制。
关键词:异步电动机 矢量控制 Matlab 仿真
Simulation of Vector Control System for Asynchronous Motor
Abstract:
According to the basic principles of induction motor vector control , this paper
constructssimulation model of rotor magnetic field oriented vector control system based on the
MATLAB software.It verifies the accuracy of the model by simulation. Results show that it has
good dynamic performance,andit realizes the decoupling control system.
Key words: asynchronous-motor; vector control; matlab simulation
0 引言
异步电动机具有非线性、强耦合、多变
量的性质,要获得良好的调速性能,必须从
其动态模型出发,分析异步电动机的转矩和
磁链控制规律,研究高性能异步电动机的调
速方案。矢量控制就是基于动态模型的高性
能的交流电动机调速系统的控制方案之一。
所谓矢量控制,就是通过矢量变换和按转子
磁链定向,得到等效直流电动机模型,在按
转子磁链定向坐标系中,用直流电动机的方
法控制电磁转矩与磁链,然后将转子磁链定
向坐标系中的控制量经变换得到三相坐标
系的对应量,以实施控制。
1 异步电动机矢量控制原理及基本
方程式
1.1 基本公式
矢量控制系统的基本思路是以产生相
同的旋转磁动势为准则,将异步电动机在静
止三相坐标系上的定子交流电流通过坐标
变换等效成同步旋转坐标系上的直流电流,
并分别加以控制,从而实现磁通和转矩的解
耦控制,以达到直流电机的控制效果。异步电
动机在两相同步旋转坐标系上的数学模型
包括电压方程、磁链方程和电磁转矩方程。
分别如下:
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
���
�
���
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
rq
rd
sq
sd
rrrsmms
rsrrmm
mmsss
mmsss
rq
rd
sq
sd
i
i
i
i
PLRLPLL
LPLRLPL
PLLPLRL
LPLLPLR
u
u
u
u
��
��
��
��
1
11
11
(1)
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
rq
rd
sq
sd
rm
rm
ms
ms
rq
rd
sq
sd
i
i
i
i
LL
LL
LL
LL
00
00
00
00
�
�
�
�
(2)
)(
rqsdrdsqmpe
iiiiLnT ��
(3)
当两相同步旋转坐标系按转子磁链定