



ShearLab 3D
Manual
v1.0
August the 29th, 2013

Contents
1 Intro dution 2
2 Shearlets - A Brief Overview 2
2.1 Continuous Shearlet System . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Cone-Adapted Shearlet System . . . . . . . . . . . . . . . . . . . . . . . . 3
2.3 Disrete Shearlet Transform . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.4 Frame Property . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.5 Sparse Approximation sing Shearlets . . . . . . . . . . . . . . . . . . . . . 5
2.6 Referenes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Digital Shearlet Transform 6
3.1 2D Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.2 3D Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.3 Inverse Digital Shearlet Transform . . . . . . . . . . . . . . . . . . . . . . 8
4 ShearLab 3D 8
4.1 Implementation of the Digital Shearlet Transform . . . . . . . . . . . . . . 8
4.2 How to Use ShearLab 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.2.1 Compute a Shearlet Deomposition . . . . . . . . . . . . . . . . . . 10
4.2.2 Serial Deomp osition for Large Data . . . . . . . . . . . . . . . . . 11
4.2.3 Compute the Reonstrution . . . . . . . . . . . . . . . . . . . . . 12
4.2.4 Serial Reonstrution for Large Data . . . . . . . . . . . . . . . . . 13
5 Examples 13
5.1 Image Denoising . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.2 Video Denoising . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1
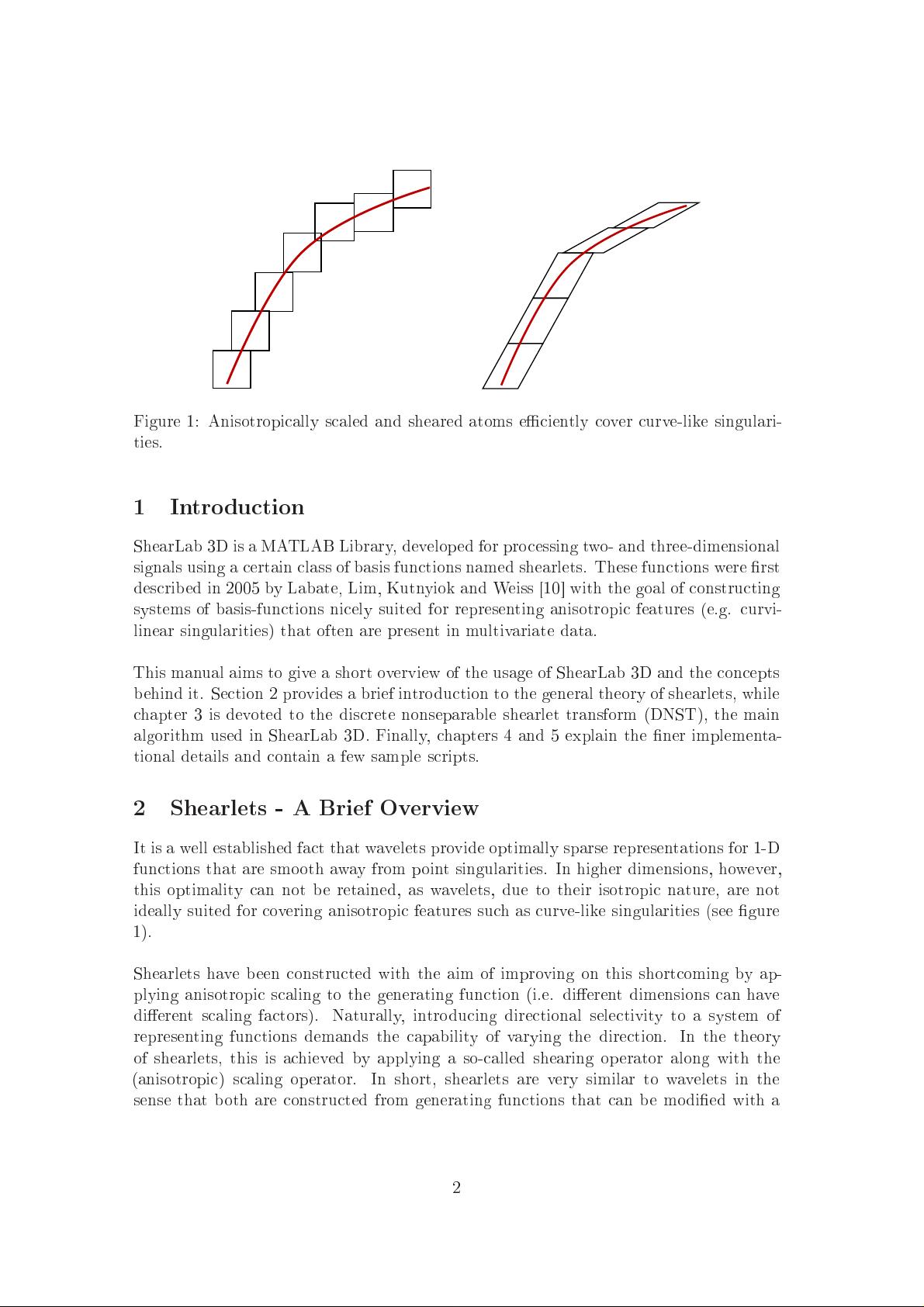
Figure 1: Anisotropially saled and sheared atoms eiently over urve-like singulari-
ties.
1 Intro dution
ShearLab 3D is a MATLAB Library, developed for pro essing two- and three-dimensional
signals using a ertain lass of basis funtions named shearlets. These funtions were rst
desrib ed in 2005 by Labate, Lim, Kutnyiok and Weiss [10℄ with the goal of onstruting
systems of basis-funtions niely suited for representing anisotropi features (e.g. urvi-
linear singularities) that often are present in multivariate data.
This manual aims to give a short overview of the usage of ShearLab 3D and the onepts
b ehind it. Setion 2 provides a brief introdution to the general theory of shearlets, while
hapter 3 is devoted to the disrete nonseparable shearlet transform (DNST), the main
algorithm used in ShearLab 3D. Finally, hapters 4 and 5 explain the ner implementa-
tional details and ontain a few sample sripts.
2 Shearlets - A Brief Overview
It is a well established fat that wavelets provide optimally sparse representations for 1-D
funtions that are smo oth away from p oint singularities. In higher dimensions, however,
this optimality an not be retained, as wavelets, due to their isotropi nature, are not
ideally suited for overing anisotropi features suh as urve-like singularities (see gure
1).
Shearlets have b een onstruted with the aim of improving on this shortoming by ap-
plying anisotropi saling to the generating funtion (i.e. dierent dimensions an have
dierent saling fators). Naturally, intro duing diretional seletivity to a system of
representing funtions demands the apability of varying the diretion. In the theory
of shearlets, this is ahieved by applying a so-alled shearing operator along with the
(anisotropi) saling operator. In short, shearlets are very similar to wavelets in the
sense that both are onstruted from generating funtions that an be mo died with a
2

50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500
Figure 2: A square is (parab olially) saled twie and sheared three times.
ertain operator. But while for wavelets, only isotropi saling is p ossible, shearlets are
sub jet to b oth anisotropi saling and shearing (see gure 2).
2.1 Continuous Shearlet System
Let
A
a
=
a 0
0 a
1/2
, S
s
=
1 s
0 1
(1)
b e a (parab oli) saling matrix and a shearing matrix with
a > 0
, then, assuming the
existene of a generating funtion
ψ ∈ L
2
(R
2
)
, a two-dimensional ontinuous shearlet
system
SH
cont
(ψ) = {ψ
a,s,t
= a
3/4
ψ(A
−1
a
S
−1
s
(· − t)) | a > 0, s ∈ R, t ∈ R
2
},
(2)
and the asso iated shearlet transform
f 7→ SH
ψ
f(a, s, t) = hf, ψ
a,s,t
i
(3)
with
f ∈ L
2
(R
2
)
and
(a, s, t) ∈ R
>0
× R × R
2
an b e dened. So
SH
ψ
maps a funtion
f ∈ L
2
(R
2
)
to a set of o eients where eah o eient is indexed by a saling parameter
a
, a shearing parameter
s
and a translation parameter
t
.
2.2 Cone-Adapted Shearlet System
One lo ok at gure 2 reveals a signiant problem of the shearlet system just introdued.
In order to apture horizontally aligned anisotropi strutures, one would have to ap-
ply the shearlet matrix a great numb er of times (leading to shearlets that are almost
3

50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500
210 220 230 240 250 260 270 280 290 300
210
220
230
240
250
260
270
280
290
300
Figure 3: The leftmost image shows the tiling of the frequeny-domain used in the one-
adapted shearlet systems. The piture in the enter shows the magnitude response of a
shearlet within the horizontal ones of the frequeny domain while the image to the right
shows the same shearlet in the time-domain.
horizontally aligned but also very alongated). To avoid this issue, whih would be very
diult to handle in any digital implementation, the so-alled one-adapted ontinuous
shearlet system was intro dued. Here, the Fourier-domain is partitioned into four ones
(two horizontal, two vertial) and a square-shap ed low-pass region (see gure 3). The
horizontal and vertial ones are now asso iated with their own generating funtions
ψ,
˜
ψ
and additionally, we intro due a saling funtion
φ
, overing the low-pass region.
Let
˜
A
a
=
a
1/2
0
0 a
(4)
b e another saling matrix, shearlet generators
ψ,
˜
ψ ∈ L
2
(R
2
)
and a saling funtion
φ ∈ L
2
(R
2
)
b e given. The one-adapted ontinuous shearlet system
SH
cont
(φ, ψ,
˜
ψ)
is
then given by the union of the following sets:
Φ =
φ
t
= φ(· − t) : t ∈ R
2
Ψ =
n
ψ
a,s,t
= a
−
3
4
ψ(A
−1
a
S
−1
s
(· − t)) : a ∈ (0, 1], |s| ≤ 1 + a
1/2
, t ∈ R
2
o
˜
Ψ =
n
˜
ψ
a,s,t
= a
−
3
4
˜
ψ(
˜
A
−1
a
S
−T
s
(· −t)) : a ∈ (0, 1], |s| ≤ 1 + a
1/2
, t ∈ R
2
o
.
The resp etive transform an be dened analogous to (3 ).
2.3 Disrete Shearlet Transform
A disrete one-adapted shearlet system an now b e dened as a ountable subset of the
ontinuous one-adapted shearlet system.
Let
φ ∈ L
2
(R
2
)
b e a saling funtion,
ψ,
˜
ψ ∈ L
2
(R
2
)
b e shearlet generators and
c =
(c
1
, c
2
) ∈ R
2
>0
b e sampling onstants then the regular one-adapted disrete shearlet
4













