





I
2
C-Master Core
Specification
Author: Richard Herveille
rherveille@opencores.org
Rev. 0.9
July 3, 2003

This page has been intentionally left blank
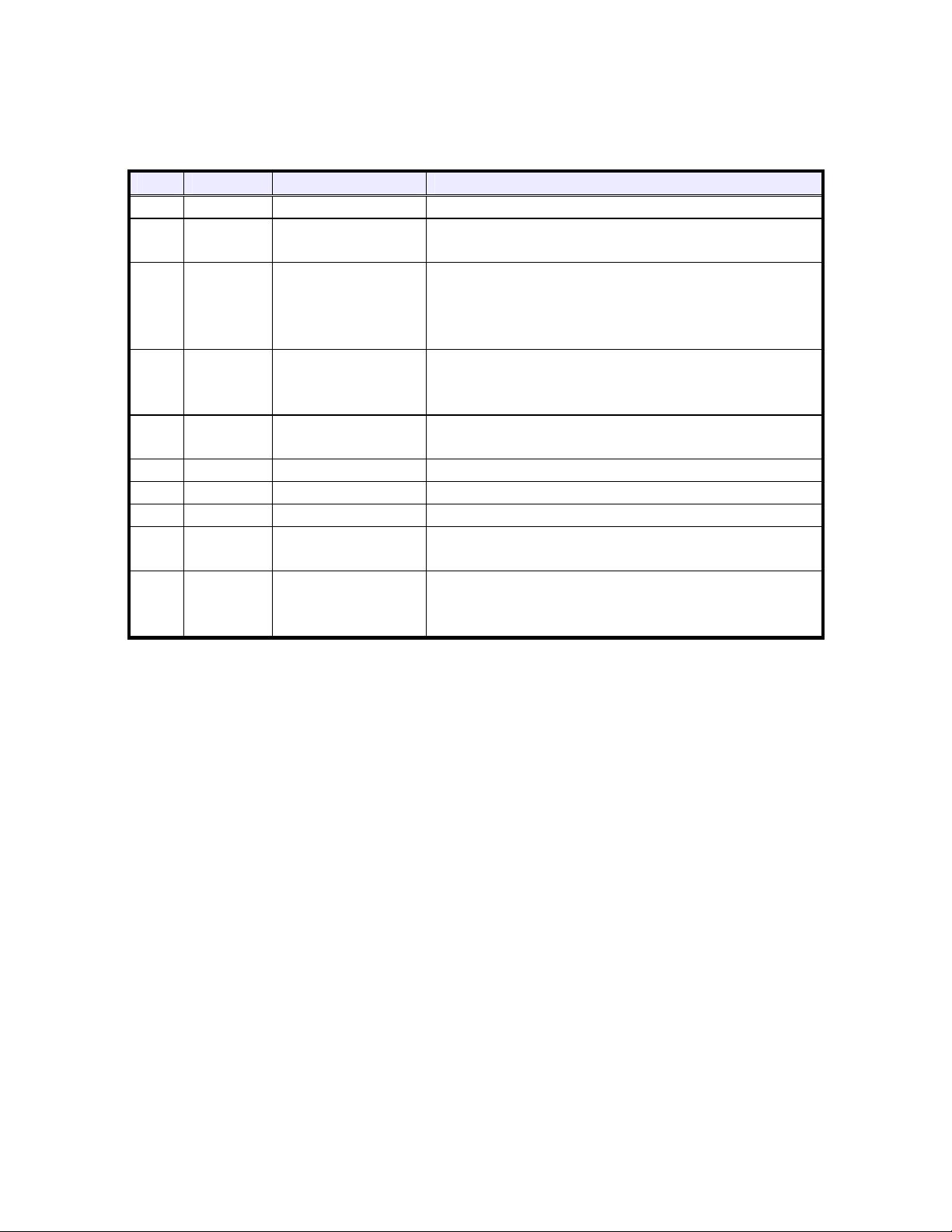
Revision History
Rev. Date Author Description
0.1 17/02/01 Richard Herveille First draft release
0.2 01/03/01 Richard Herveille Some cleaning up throughout the document
Added ‘Programming Examples’ section
0.3 Richard Herveille Added some comments after core-changes
- added BUSY bit (status register)
- changed I2C IO for ASIC support
- added comment for FGPA IO
0.4 10/19/01 Richard Herveille Changed core’s databus size to 8bit.
Changed documentation to reflect changes.
Changed port names to new naming convention.
0.5 18/02/02 Richard Herveille Changed table headers.
Added OpenCores logo.
0.5a 05/02/02 Richard Herveille Reviewed entire document.
0.6 21/03/02 Richard Herveille Added Appendix A, Synthesis Results
0.7 25/06/02 Richard Herveille Changed Prescale Register formula
0.8 30/12/02 Richard Herveille Added Multi-Master capabilities.
New timing diagrams.
0.9 03/07/03 Richard Herveille Changed ‘0x5C’ to ‘0xAC’ in Example1.
Changed ‘RW’ to ‘W’ in Command Register.
Changed ‘RW’ to ‘W’ in Transmit Register.

OpenCores I
2
C-Master core 7/3/2003
www.opencores.org Rev 0.8 Preliminary 1 of 15
1
Introduction
I
2
C is a two-wire, bi-directional serial bus that provides a simple and efficient method of
data exchange between devices. It is most suitable for applications requiring occasional
communication over a short distance between many devices. The I
2
C standard is a true
multi-master bus including collision detection and arbitration that prevents data
corruption if two or more masters attempt to control the bus simultaneously.
The interface defines 3 transmission speeds:
- Normal: 100Kbps
- Fast: 400Kbps
- High speed: 3.5Mbps
Only 100Kbps and 400Kbps modes are supported directly. For High speed special IOs
are needed. If these IOs are available and used, then High speed is also supported.
FEATURES
• Compatible with Philips I
2
C standard
• Multi Master Operation
• Software programmable clock frequency
• Clock Stretching and Wait state generation
• Software programmable acknowledge bit
• Interrupt or bit-polling driven byte-by-byte data-transfers
• Arbitration lost interrupt, with automatic transfer cancelation
• Start/Stop/Repeated Start/Acknowledge generation
• Start/Stop/Repeated Start detection
• Bus busy detection
• Supports 7 and 10bit addressing mode
• Operates from a wide range of input clock frequencies
• Static synchronous design
• Fully synthesizable
OpenCores I
2
C-Master core 7/3/2003
www.opencores.org Rev 0.8 Preliminary 2 of 15
2
IO ports
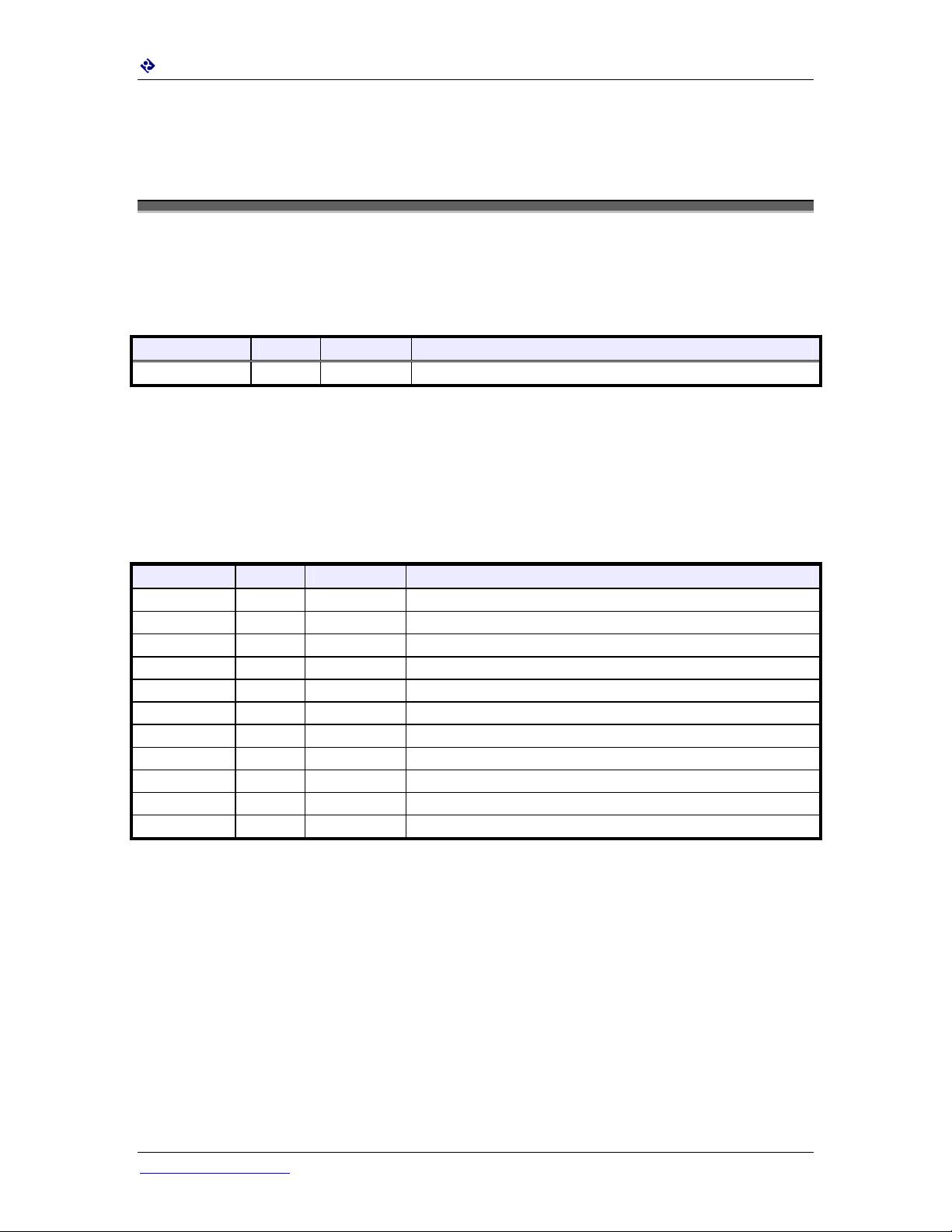
2.1 Core Parameters
Parameter Type Default Description
ARST_LVL Bit 1’b0 Asynchronous reset level
2.1.1 ARST_LVL
The asynchronous reset level can be set to either active high (1’b1) or active low (1’b0).
2.2 WISHBONE interface signals
Port Width Direction Description
wb_clk_i 1 Input Master clock
wb_rst_i 1 Input Synchronous reset, active high
arst_i 1 Input Asynchronous reset
wb_adr_i 3 Input Lower address bits
wb_dat_i 8 Input Data towards the core
wb_dat_o 8 Output Data from the core
wb_we_i 1 Input Write enable input
wb_stb_i 1 Input Strobe signal/Core select input
wb_cyc_i 1 Input Valid bus cycle input
wb_ack_o 1 Output Bus cycle acknowledge output
wb_inta_o 1 Output Interrupt signal output
The core features a WISHBONE RevB.3 compliant WISHBONE Classic interface. All
output signals are registered. Each access takes 2 clock cycles.
arst_i is not a WISHBONE compatible signal. It is provided for FPGA implementations.
Using [arst_i] instead of [wb_rst_i] can result in lower cell-usage and higher
performance, because most FPGAs provide a dedicated asynchronous reset path. Use
either [arst_i] or [wb_rst_i], tie the other to a negated state.













评论1