1
PID 控制算法
5.1 PID 控制原理与程序流程
5.1.1 过程控制的基本概念
过程控制――对生产过程的某一或某些物理参数进行的自动控制。
一、模拟控制系统
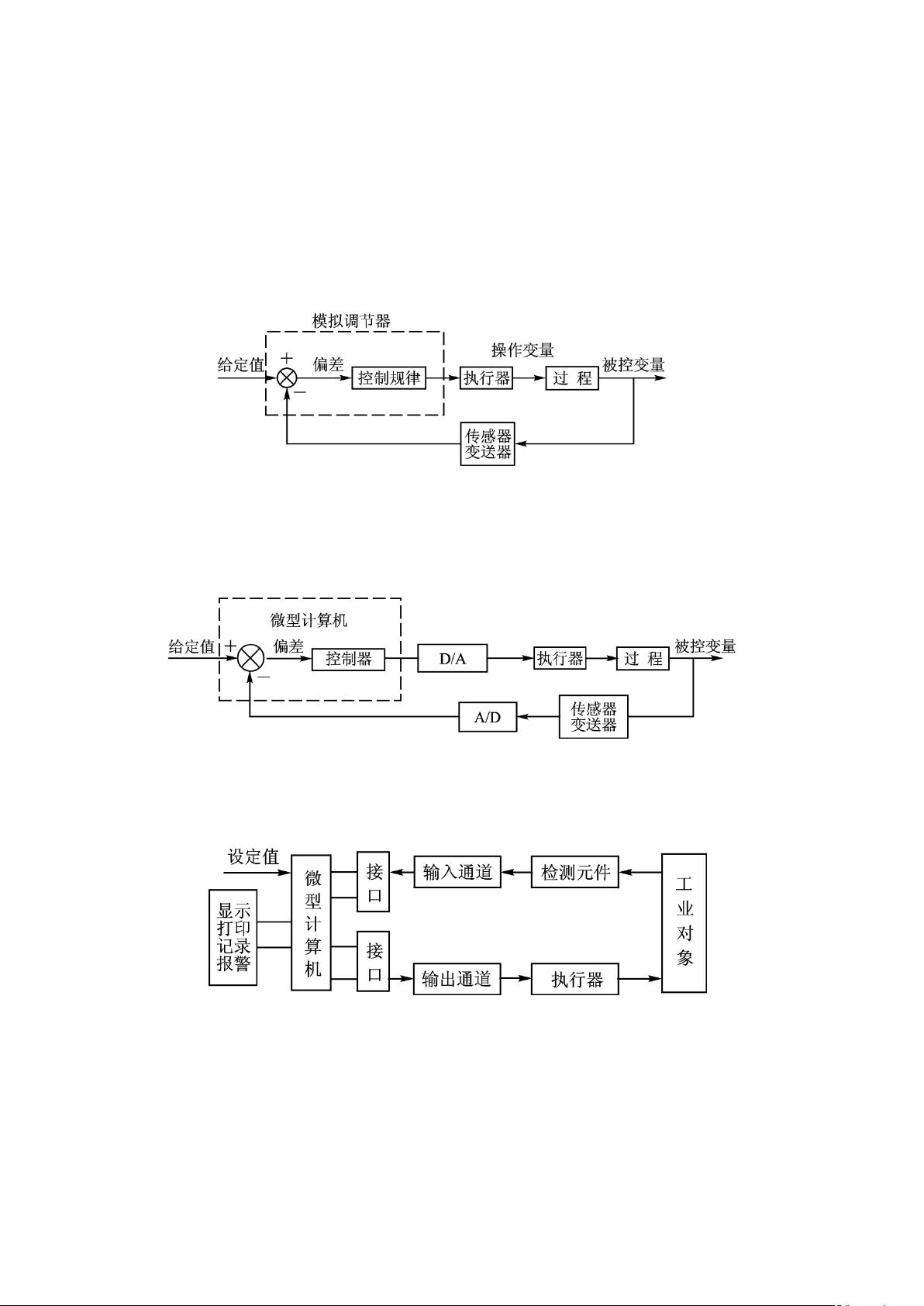
图 5-1-1 基本模拟反馈控制回路
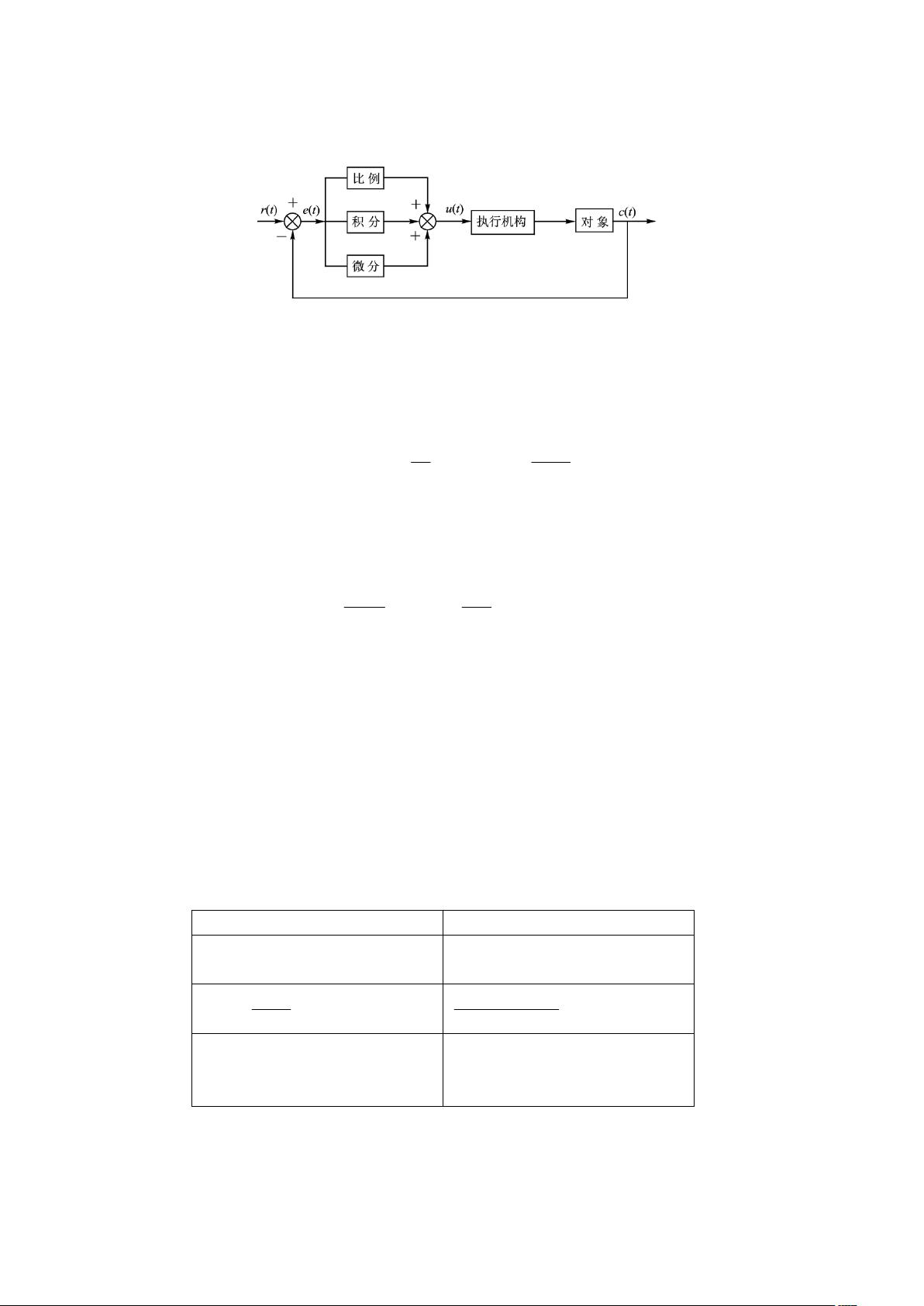
被控量的值由传感器或变送器来检测,这个值与给定值进行比较,得到偏差,模拟调节
器依一定控制规律使操作变量变化,以使偏差趋近于零,其输出通过执行器作用于过程。
控制规律用对应的模拟硬件来实现,控制规律的修改需要更换模拟硬件。
二、微机过程控制系统
图 5-1-2 微机过程控制系统基本框图
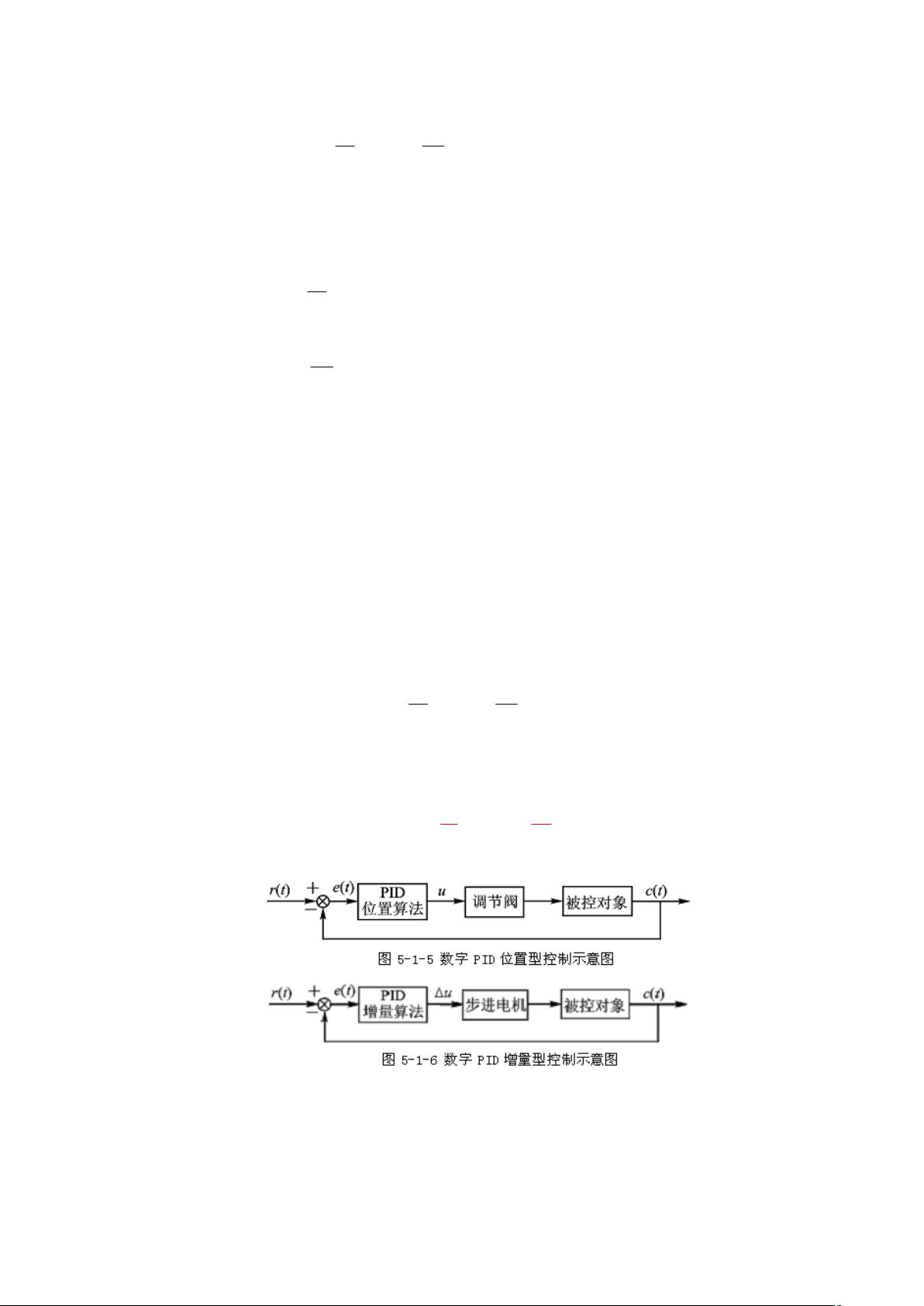
以微型计算机作为控制器。控制规律的实现,是通过软件来完成的。改变控制规律,只
要改变相应的程序即可。
三、数字控制系统 DDC
图 5-1-3 DDC 系统构成框图
DDC(Direct Digital Congtrol)系统是计算机用于过程控制的最典型的一种系统。微型计算
机通过过程输入通道对一个或多个物理量进行检测,并根据确定的控制规律(算法)进行计算,
通过输出通道直接去控制执行机构,使各被控量达到预定的要求。由于计算机的决策直接作
用于过程,故称为直接数字控制。�
DDC 系统也是计算机在工业应用中最普遍的一种形式。