Abstract— In this paper we describe the experimental work
and present an algorithm for vehicle detection using sensor
node data. Both acoustic and magnetic signals are processed
for vehicle detection. We propose a real-time vehicle detection
algorithm called the Adaptive Threshold algorithm (ATA).
This adaptive algorithm first computes the time-domain
energy distribution curve and then slices the energy curve
using a threshold updated adaptively by some decision states.
Finally, the hard decision results from threshold slicing are
passed to a finite-state machine, which makes the final vehicle
detection decision.
Real-time tests and offline simulations both
demonstrate that the proposed algorithm is effective.
I. INTRODUCTION
he idea of deploying sensors to monitor/measure the
behaviour of a system is not novel; however, some of
the technological and economic issues remain challenging.
In particular, many issues need to be considered for the
price one is willing to pay for collecting information and
making system improvement. For example, can we collect
the data we want with only wired sensors? Wireless sensors
offer the flexibility advantage, but just like any portable
device, the limit of the energy source is always a concern.
Can we deploy a network of sensors so that we have a high
density and fidelity of instrumentation? A high density of
sensors is an obvious benefit, but it also means more cost.
In other words, is large-scale deployment economically
feasible? All these issues, nonetheless, can be categorised
Manuscript received April 1, 2004. This work was supported in part by
the Division of Research and Innovation, U. S. California Department of
Transportation, under Task Orders 4153 and 4224.
J. Ding was a Ph.D. student with the Dept. of Electrical Engineering
and Computer Sciences, and the Dept. of Mechanical Engineering,
University of California, Berkeley, CA 94720, USA. He is now with the
General Electric Research Center, Niskayuna, NY 12345, USA. (phone:
(518) 387-4020; e-mail: ding@ research.ge.com).
S.-Y. Cheung is a Ph.D. student with the Department of Mechanical
Engineering, University of California, Berkeley, CA 94720, USA. (e-mail:
sing@uclink4. berkeley.edu).
C.-W. Tan is a researcher with the California PATH program, U. C.
Berkeley Richmond Field Station, Richmond, CA 94804, USA. (e-mail:
tan@eecs.berkeley.edu).
P. Varaiya is a Professor with the Department of Electrical Engineering
and Computer Sciences, University of California, Berkeley, CA 94720,
USA. (e-mail: varaiya@eecs.berkeley.edu)
into three inter-related categories: cost, benefit, and
technological limitation. These three issues will dictate the
choice of the sensing device for applications such as vehicle
detection.
A vehicle detection system has four main components: a
sensor to sense the signals generated by vehicles, a
processor to process the sensed data, a communication unit
to transfer the processed data to the base station for further
processing, and an energy source. Conventional vehicle
detection technologies, such as inductive loop detectors, are
not suitable for large-scale deployment because they are
usually intrusive and disruptive to traffic, resulting in high
installation and maintenance costs. By lowering the cost
barriers and reducing the complexity of collecting
information from the physical world, wireless sensor
technology frees sensors to go where cost and practicality
have kept them from going in the past. Also with recent
advances in microelectronics and MEMS technology, all of
the four main components of a vehicle detection system can
now be integrated into a tiny single device called a sensor
node. Each of these sensor nodes is called a Mote. In the
future, a vehicle detection system can be a network of low-
cost sensor nodes interconnected as an ad hoc network via
wireless communication. This could be deployed with low
maintenance costs by controlling the power consumption of
the energy source for transmission and reception of data
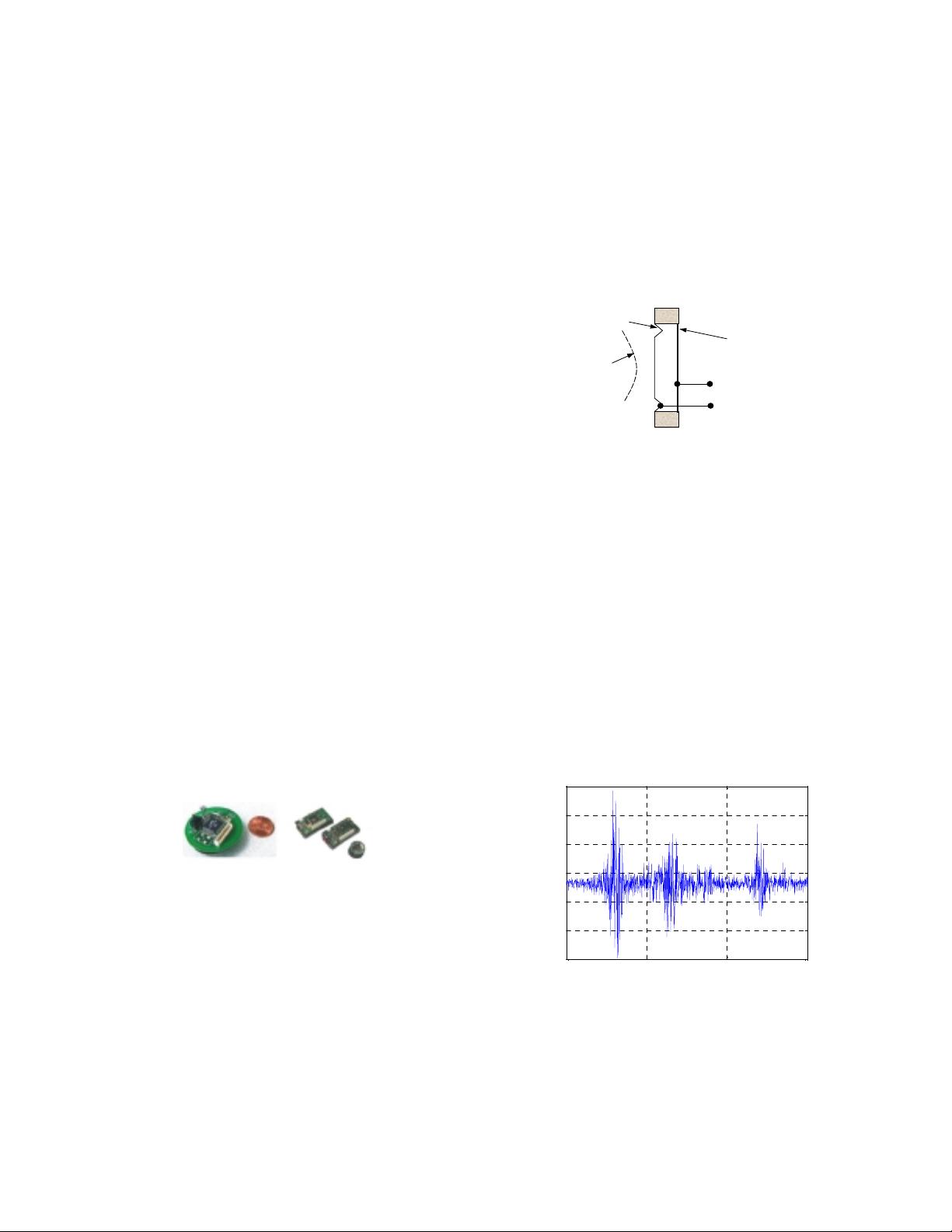
packets [8]. One such sensor node, shown in Figure 1, is
developed under the Smart Dust research project conducted
at the Department of Electrical Engineering and Computer
Sciences, University of California, Berkeley [1, 2]. These
wireless sensor nodes are battery powered and are expected
to have a lifetime of couple of years. Thus, it makes sense
that each sensor node processes the sensor data locally and
sends only the vehicle detection results back to the base
station (or gateway sensor node). This will reduce the
sensor network traffic and achieve a longer lifetime of
operation. In what follows, we first review some of the
current signal processing techniques for vehicle detection.
Various signal-processing algorithms for vehicle
detection have been proposed for vehicle detection [3,4,5].
These algorithms are for detecting vehicle acoustic signals,
and the analysis are based in three domains: time,
frequency, and time-frequency domains. Acoustic signal
Signal Processing of Sensor Node Data for
Vehicle Detection
Jiagen (Jason) Ding, Sing-Yiu Cheung, Chin-Woo Tan and Pravin Varaiya, Fellow, IEEE
T