









IntrodcutiontoRoboticSystems
`
FinalProjectReport
Path planning of Autonomous Mobile robot
New Approach
Submittedby
:
HasanAbuMeteirWalidIssa
120080503120060065
Submittedto:
AssistantProfessor:Dr.Iyadabuhadrous
2010-2011
IslamicUniversityOfGaza
Faculty of Engineering
Department of Electrical Engineering

Path planning algorithm
Abstract
In this present work, we present an algorithm for path planning to a target for
mobile robot in unknown environment. The proposed algorithm allows a mobile robot
to navigate through static obstacles, and finding the path in order to reach the target
without collision. This algorithm provides the robot the possibility to move from the
initial position to the final position (target). The proposed path finding strategy is
designed in a grid-map form of an unknown environment with static unknown
obstacles. The robot moves within the unknown environment by sensing and avoiding
the obstacles coming across its way towards the target. When the mission is executed,
it is necessary to plan an optimal or feasible path for itself avoiding obstructions in its
way and minimizing a cost such as time, energy, and distance. The proposed path
planning must make the robot able to achieve these tasks: to avoid obstacles, and to
make ones way toward its target. The algorithms are implemented in Matlab,
afterwards tested with Matlab GUI; whereby the environment is studied in a two
dimensional coordinate system. The simulation part is an approach to the real
expected result; this part is done using Matlab to recognize all objects within the
environment and since it is suitable for graphic problems. Taking the segmented
environment issued from Matlab development, the algorithm permit the robot to move
from the initial position to the desired position following an estimated trajectory using
Maps in Matlab GUI.

Introduction:
In robotic navigation, path planning is aimed at getting the optimum collision-free
path between a starting and target locations. The planned path is usually decomposed
into line segments between ordered sub-goals or way points. In the navigation phase,
the robot follows those line segments toward the target. The navigation environment
is usually represented in as configuration space. Depending on the surrounding
environment and the running conditions, the optimality criterion for the path is
determined. For example, in most of indoor navigation environments, the optimum
path is the safest one, i.e. being as far as possible from the surrounding obstacles,
whereas for outdoor navigation, the shortest path is more recommended.
The aim of this project is to compute the optimum path between a start and a target
point in a given navigation map.
The idea of the project is to represent every obstacle as a charge that has a repulsive
potential. In the other hand the target represent a charge has an attractive potential.
By combining these potentials a new map will be generated with an optimum path.
The algorithm:
The algorithm deals with every obstacle as a point source of repulsive potential affect
on the robot with an inverse proportional of the distance square between them. This
force can be computed by:
W/(J-y)^2+(I-x)^2
Where I and J represent all points in the map
X and Y represent the center of the obstacle
W represent the weight of the charge
This generate a matrix map and every element of this matrix carry the amount of
potential found on (I,J) coordinates. This map will have large values at the obstacles
centers and boundaries.
The other forces are generated by the target and it can be represented as a source of
attractive potential and it is directly proportional with the distance with the robot. This
force can be computed by:
W*sqrt((J-GoalY)^2+(I-GoalX)^2)
Where GoalY, GoalX is the target coordinates
This will generate a matrix map that has a minimum value at the target and a
maximum at the robot position.
Then by summing the two forces map we will get a map with repulsive and attractive
forces. These forces with each other will draw the path of the robot.
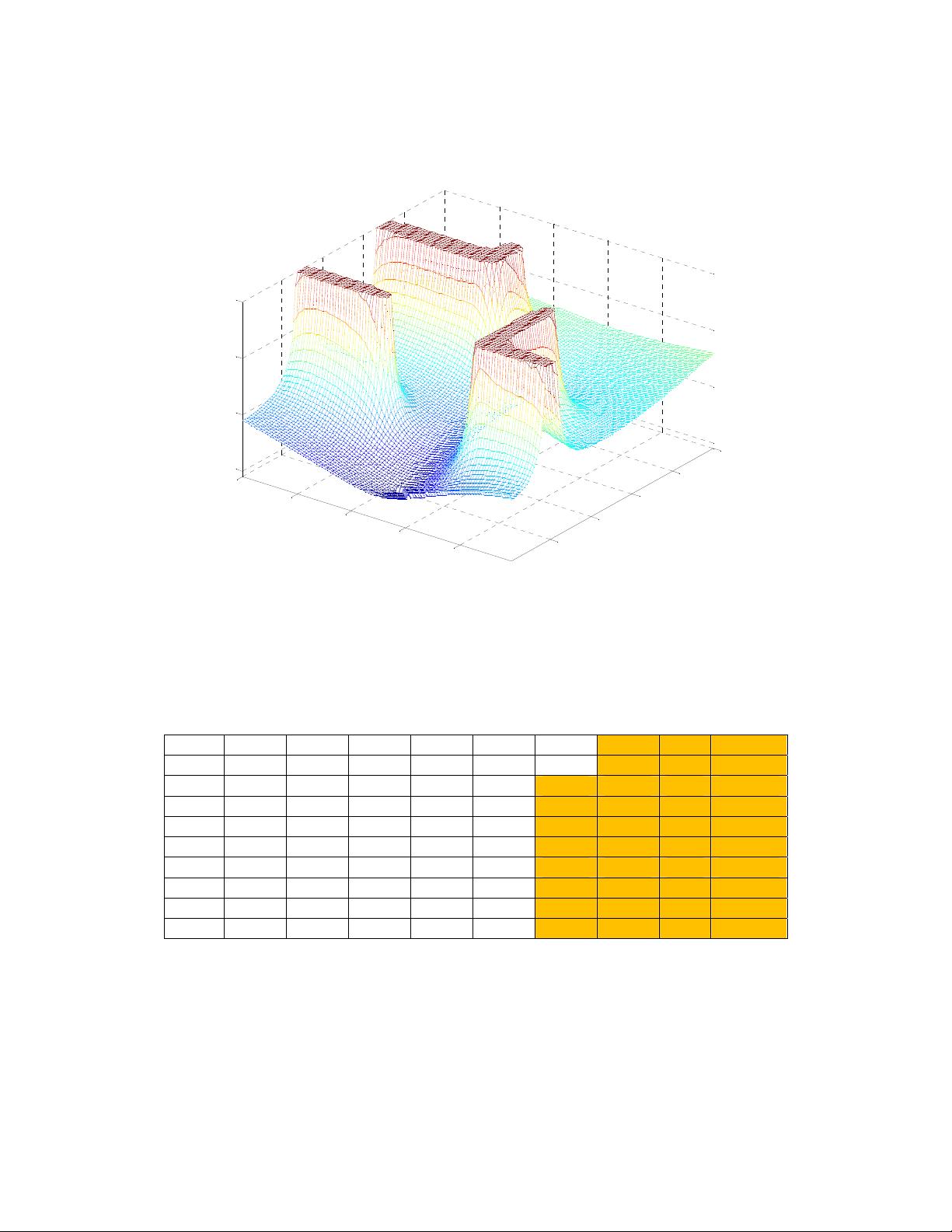
Figure 1 show the two forces and as we can see the repulsive forces was drawn as a
huge mount but the attractive one as a valley.
The table below is a sample of this map and show that the 300 value represent an
obstacle.
131.1 141.9 155.7 174.2 199.8 237.7
297.8 300 300 300
130.9 141.8 155.8 174.5 200.4 238.6 299.6 300 300 300
130.6 141.7 155.9 174.7 201.0 240.5 300 300 300 300
130.2 141.4 155.8 174.9 201.4 241.1 300 300 300 300
129.7 141.1 155.7 175.0 201.6 240.6 300 300 300 300
129.1 140.8 155.6 175.2 202.1 241.4 300 300 300 300
128.5 140.3 155.5 175.4 202.9 243.7 300 300 300 300
127.8 139.8 155.3 175.6 203.7 245.4 300 300 300 300
126.9 139.2 155.0 175.9 204.5 246.0 300 300 300 300
125.9 138.5 154.7 176.2 205.6 248.0 300 300 300 300
Finding the path
The final part now is to find the path and this step takes the all map elements that
contains the entire obstacle and goal forces values and made some steps to get the
path as follows:
20
40
60
80
100
20
40
60
80
100
0
100
200
300
Path planning of a mobile robot

















评论3