


3 SVPWM 的原理及实现方法
随着电压型逆变器在高性能电力电子装置(如交流传动、不间断电源和有
源滤波器)中的广泛应用,PWM 控制技术作为这些系统的公用技术,引起人们的
高度重视,并得到越来越深入的研究。本章首先推导出 SVPWM 的理论依据,然
后给出 5 段式和 7 段式 SVPWM 的具体实现方法。
3.1 SVPWM 的基本原理
空间矢量 PWM 从电机的角度出发,着眼于如何使电机获得幅值恒定的圆形
旋转磁场,即磁通正弦。它以三相对称正弦波电压供电时交流电机的理想磁通
圆为基准,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,并
由它们比较的结果决定逆变器的开关状态,形成 PWM 波形。由于该控制方法把
逆变器和电机看成一个整体来处理,所得的模型简单,便于微处理器实时控制,
并具有转矩脉动小、噪声低、电压利用率高的优点,因此目前无论在开环调速
系统或闭环调速系统中均得到广泛的应用
[2]
。
设交流电机由理想三相对称正弦电压供电,有
[2][14]
cos
22
cos
3
3
4
cos
3
s
sA
L
sB s
sC
s
t
u
U
ut
u
t
ω
ω
π
ω
π
⎡
⎤
⎢
⎥
⎢
⎥
⎡⎤
⎢
⎥
⎛⎞
⎢⎥
=−
⎢
⎥
⎜⎟
⎢⎥
⎝⎠
⎢
⎥
⎢⎥
⎣⎦
⎢
⎥
⎛⎞
−
⎢
⎥
⎜⎟
⎝⎠
⎣
⎦
(3.1)
其中,
L
U
为电源线电压的有效值;
/3
L
U
为相电压的有效值;
s
ω
电源电压的角
频率,
2
s
s
f
ω
π
=
。
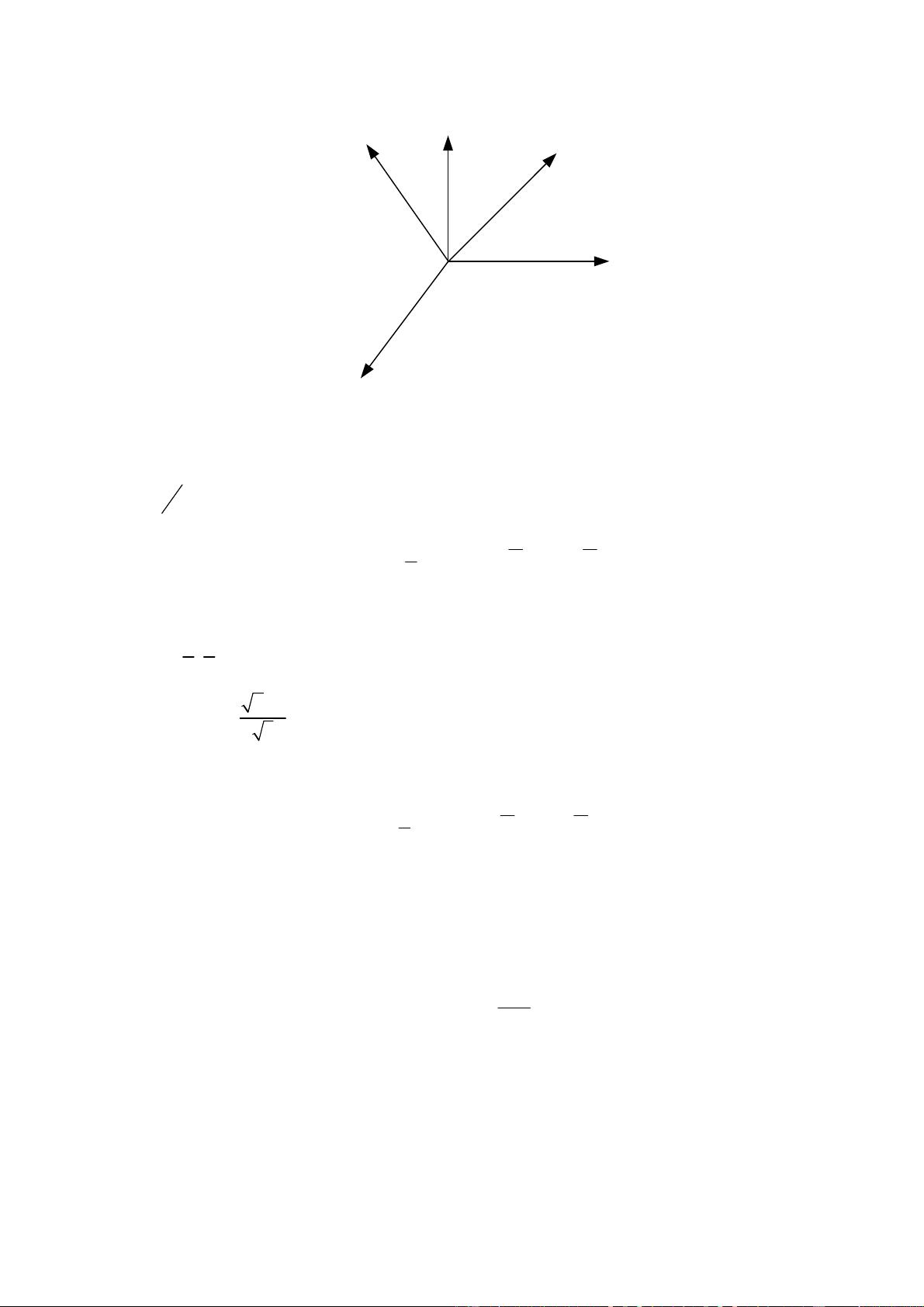
由于三相异步电动机的定子绕组空间上呈互差 120
0
分布,定义电压空间矢
量为
24
33
()
jj
SsAsB sC
UkUUe Ue
π
π
=+ +
(3.2)
其中,
S
U
为电压空间矢量,考虑到不同的变换,
k
可以取不同的值,如功率不
变,电压电流幅值不变等
[15~18]
。所采用交流电机的定子坐标系如图 3.1 所示。













评论0