
C – 1 / 4
2013 年全国大学生电子设计竞赛试题
参赛注意事项
(1)9 月 4 日 8:00 竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题;高职高
专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份
的有效证件(如学生证)随时备查。
(4)每队严格限制 3 人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制
作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队
取消评审资格。
(6)9 月 7 日 20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
简易旋转倒立摆及控制装置(C 题 )
【本科组】
一、任务
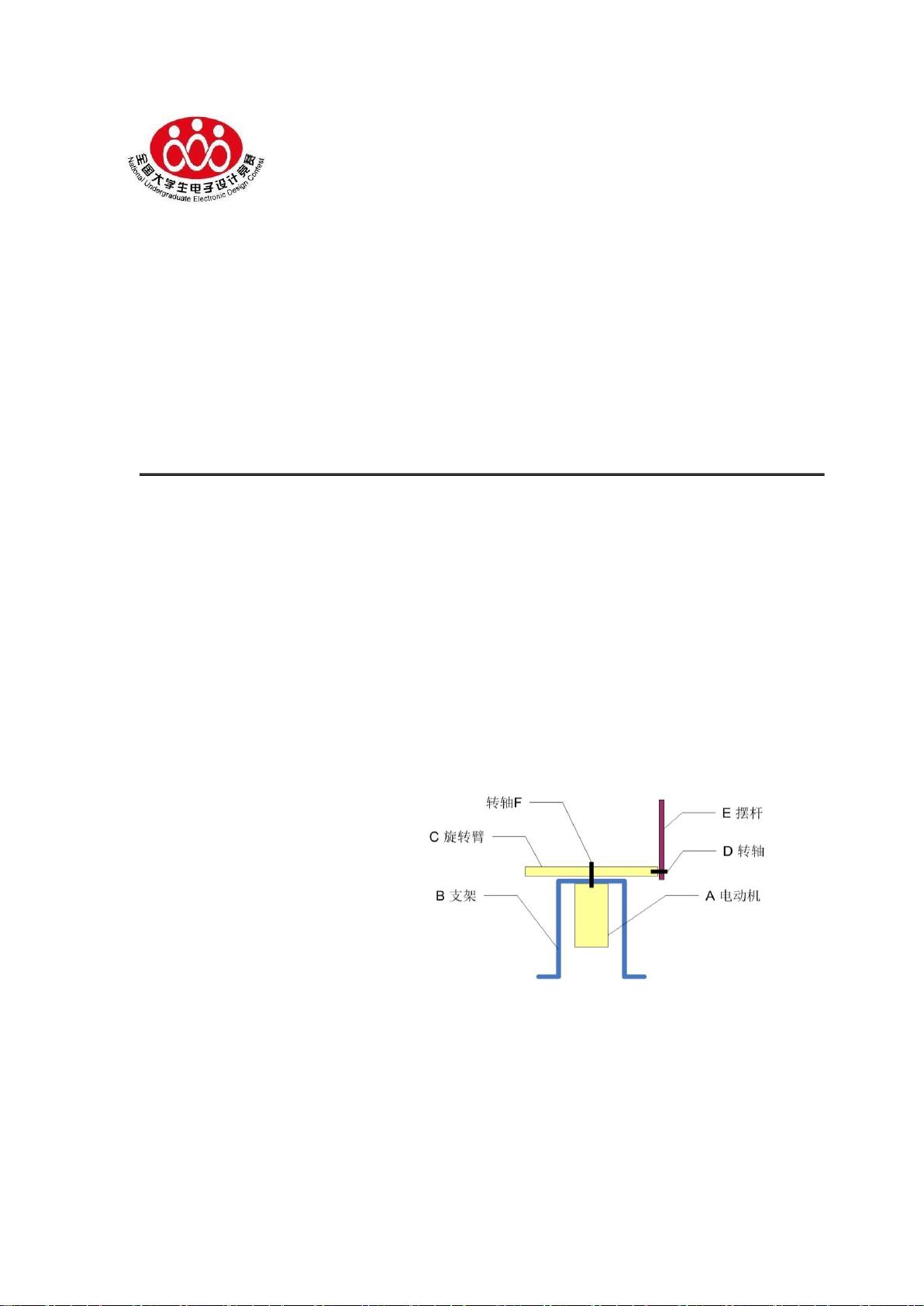
设计并制作一套简易旋转倒立摆及其控制装置。旋转倒立摆的结构如图 1 所
示。电动机 A 固定在支架 B 上,通过转轴 F 驱动旋转臂 C 旋转。摆杆 E 通过转
轴 D 固定在旋转臂 C 的一端,当旋转臂 C 在电动机 A 驱动下作往复旋转运动时,
带动摆杆 E 在垂直于旋转臂 C 的平面作自由旋转。
二、要求
图 1 旋转倒立摆结构示意图
1.基本要求
(1)摆杆从处于自然下垂状态(摆角 0°)开始,驱动电机带动旋转臂作往复
旋转使摆杆摆动,并尽快使摆角达到或超过-60°~ +60°;
资源评论


一清二白三傻
- 粉丝: 12
- 资源: 29









最新资源
- 【岗位说明】软件工程师岗位职责.docx
- 【岗位说明】软件产品经理岗位职责.docx
- 【岗位说明】软件开发部门经理岗位职责.docx
- 【岗位说明】软件开发岗位职责.docx
- 【岗位说明】软件研发部岗位职责.docx
- 【岗位说明】软件开发岗位职责描述.docx
- 【岗位说明】双创科技公司岗位安排及职责.docx
- 【岗位说明】软件研发技术部门岗位职责02.docx
- 【岗位说明】软件研发技术部门岗位职责01.docx
- 【岗位说明】研发事业部技术总监岗位职责.docx
- 【岗位说明】研发团队人员架构及岗位职责方案.docx
- 学生web网页设计与制作作业,html+css旅游杭州西湖4页,代码简单可以参考
- 【岗位说明】摄像岗位职责01.doc
- 【岗位说明】摄像岗位职责02.doc
- 【岗位说明】摄影师岗位职责.doc
- 【岗位说明】新媒体部岗位职责.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


