



相机标定
1 相机标定基本原理
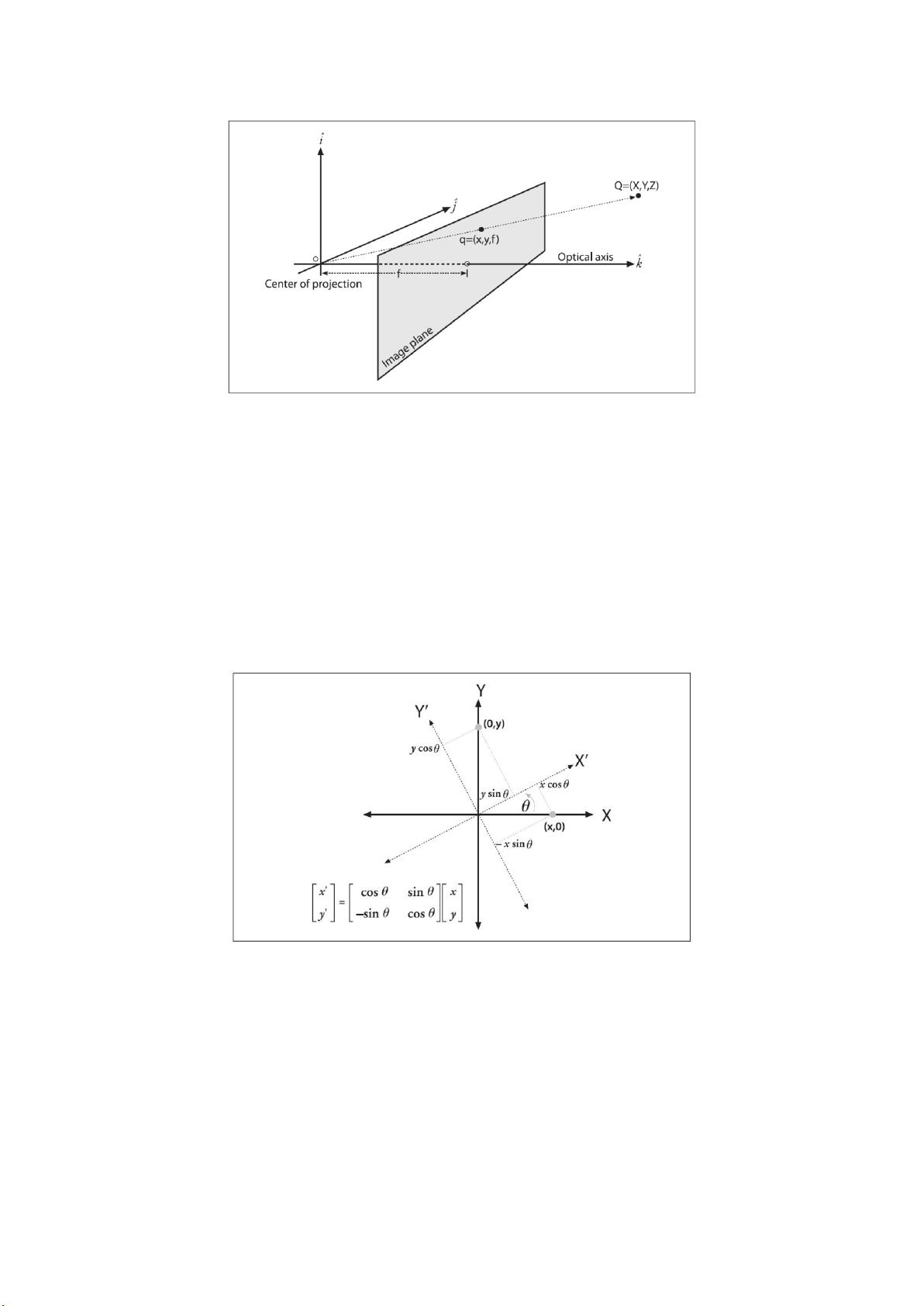
1.1 相机成像模型
目前大多数相机模型都是基于针孔成像原理建立的,因为针孔成像原理简单,并且能满
足建模的要求。除此之外还有基于应用歪斜光线追踪法和近轴光线追踪法的成像模型
[1]
。针
孔成像虽然已经展示出了相机的成像原理,但是由于针孔成像是理想的物理模型,没有考虑
相机本身的尺寸、镜头与相机轴心的偏斜等因素的影响,因此精度很低,不能满足工业机器
视觉的要求。为了使相机模型能高精度的反应相机的实际成像过程,需要再针孔成像模型的
基础上考虑镜头畸变等的因素。
图 1 针孔成像
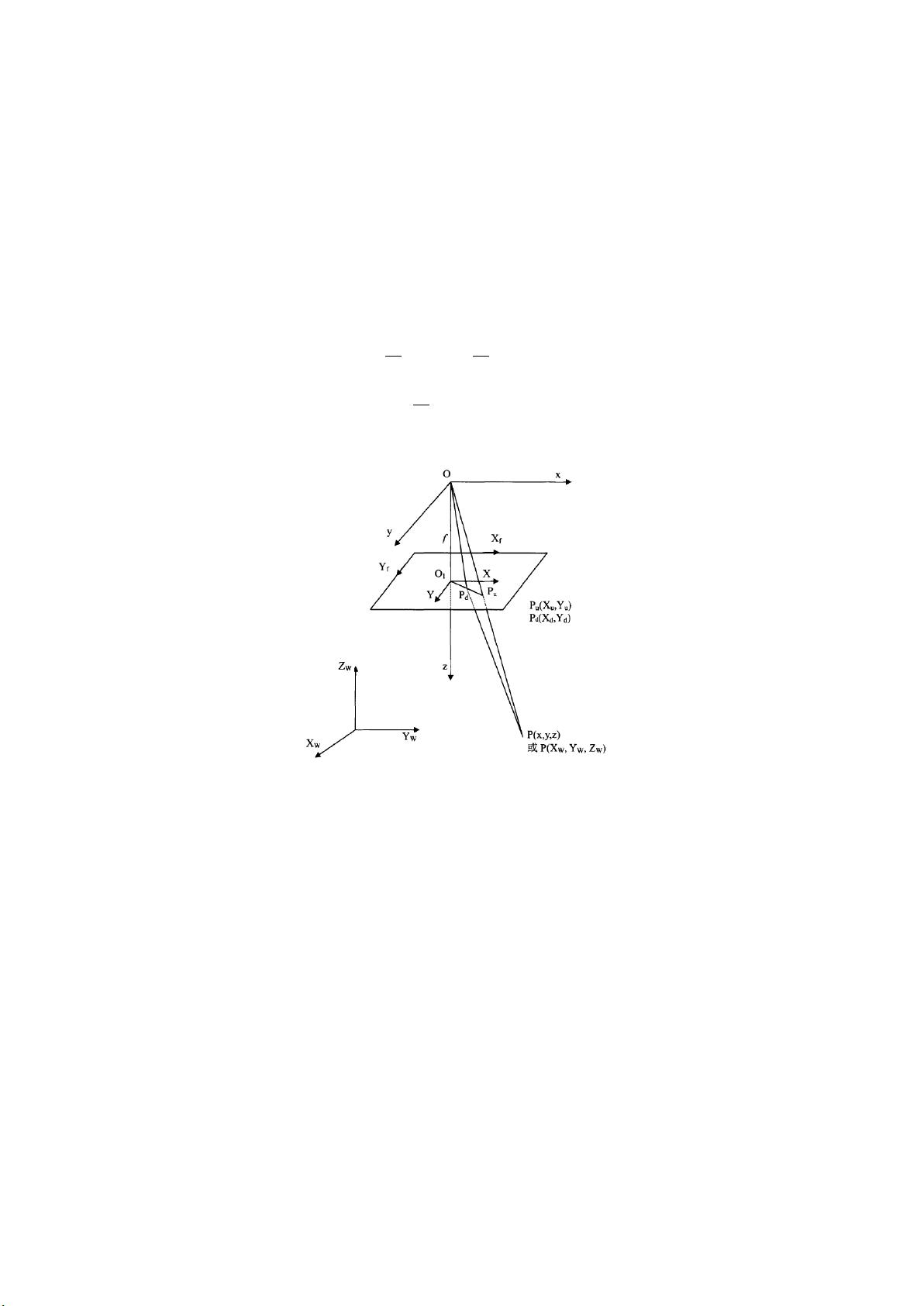
基于针孔成像原理建立的相机的成像模型,如下图所示。在相机的成像模型中,包含有
几个坐标系分别是世界坐标系、相机坐标系、图像坐标系,相机的成像过程的数学模型就是
目标点在这几个坐标系中的转化过程。
图 2 针孔成像模型
(1) 世界坐标系
,就是现实坐标系,是实际物体在现实世界中的数学描述,
是一个三维的坐标空间。
(2) 摄像机坐标系(X
c
, Y
c
),以针孔相机模型的聚焦中心为原点,以摄像机光学轴线为
Z
c
轴
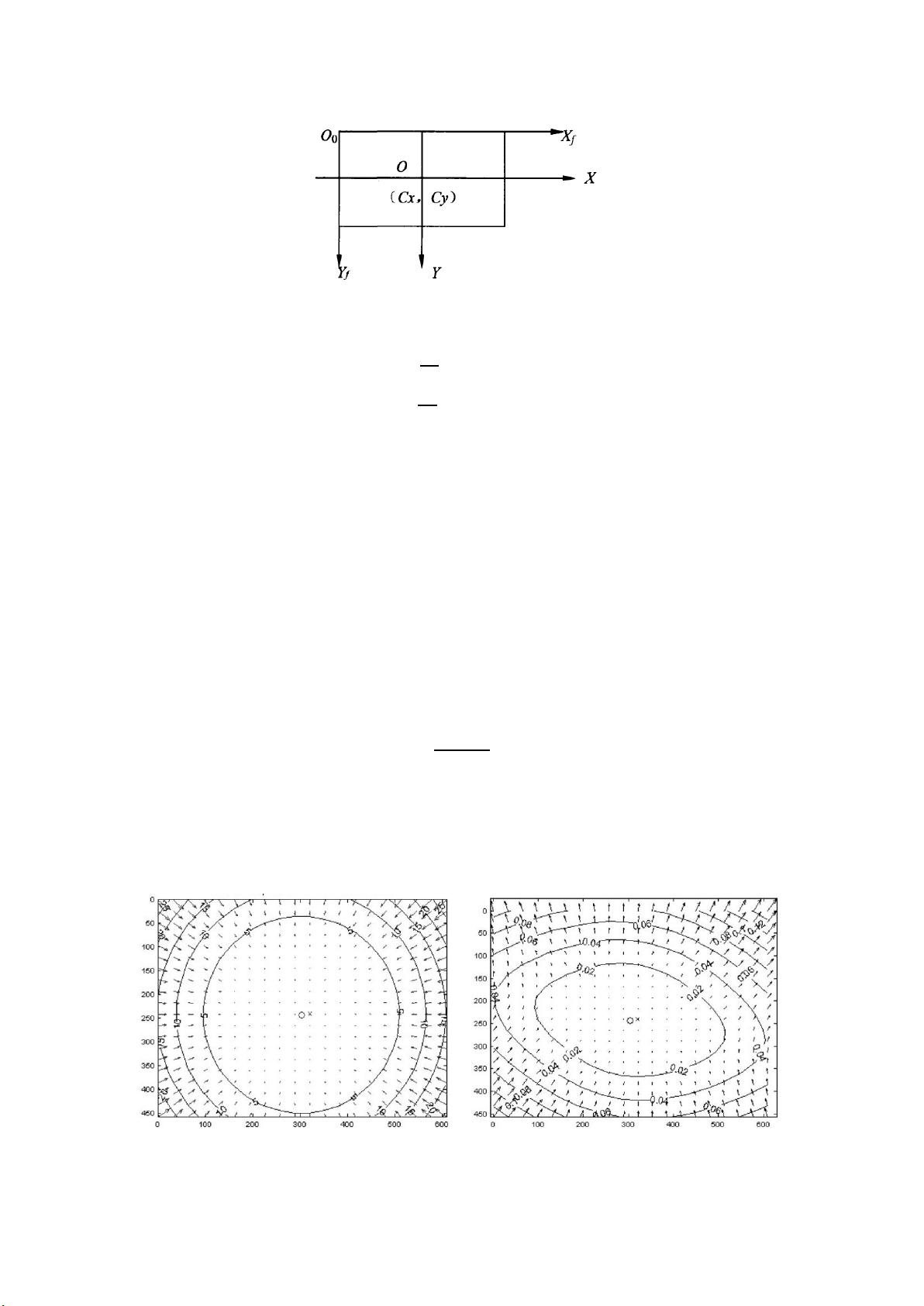
(3) 图像坐标系:分为图像像素坐标系和图像物理坐标系
为了便于数学描述将图像平面移动到针孔与世界坐标系之间。如下图所示。













评论0