单 片 机 控 制 舵 机
附:单片机控制 8 路舵机程序,串口通讯上位机程序(C#)
一、 设计内容综述
机械臂主要由手部和运动机构组成。手部是用来抓持工件的部件,运动机构使手
部完成各种转动、移动或复合运动来实现规定的动作。为了抓取空间中任意位置和
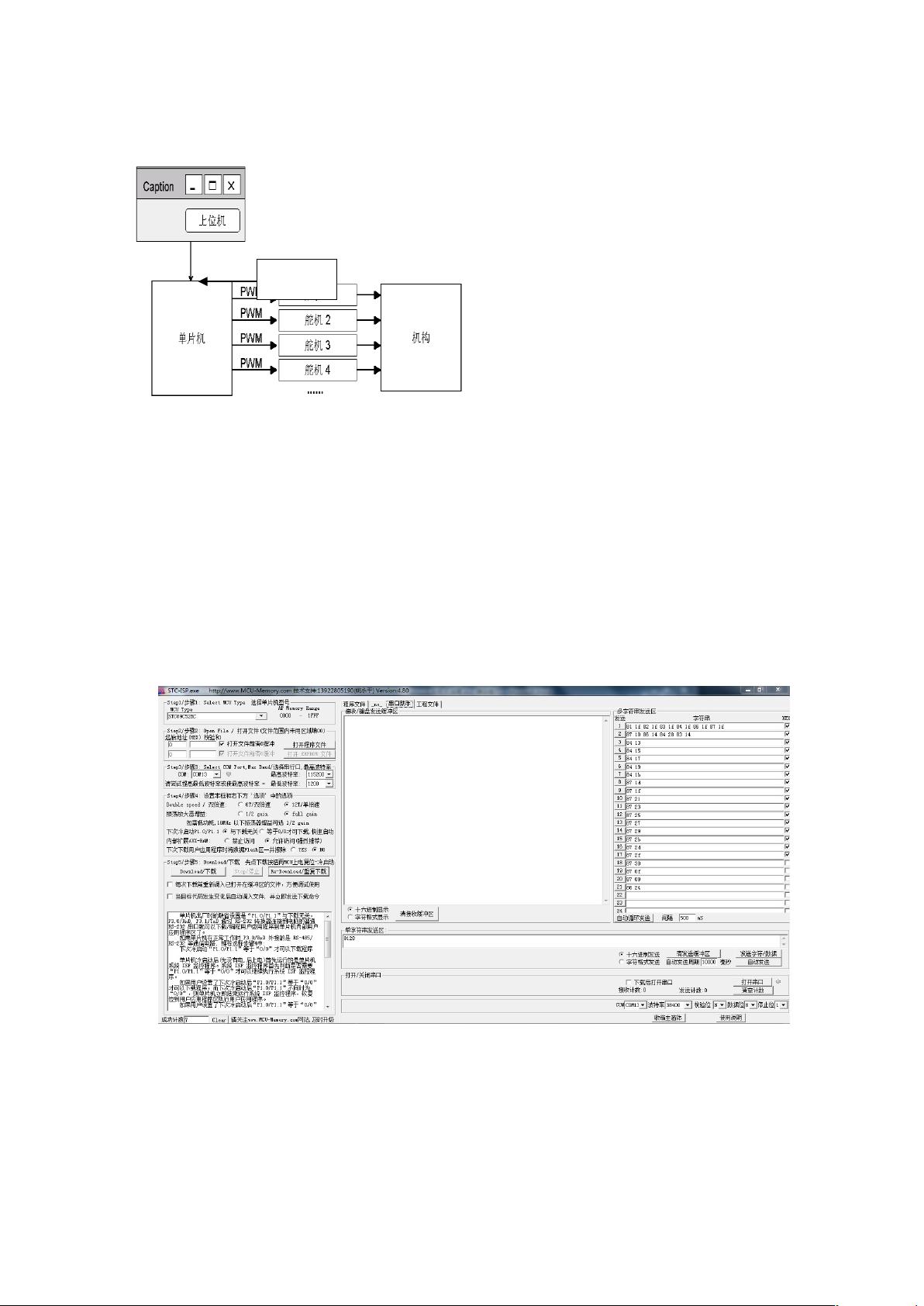
方位的物体,需有 6 个自由度,用六个舵机来控制。由单片机产生六路占空比可调
的 PWM 信号来控制机械手的运动。利用上位机与单片机通信,改变占空比从而控制
机械臂。为了使机械手运动时保持一定的连贯性,同时刻到达指定位置,机械手不
同部位运动的速度应该不同,转一个小角度时舵机的速度应该慢一些,从而达到柔
性控制。
二、所使用的关键器件和基本参数
舵机 TR213:1.速度:0.15 秒/60 度(4.8V);0.12 秒/60 度(6.0V)
2.扭矩:13kg·cm
3.范围:180°
4.控制精度:0.5°
5.精度:精度高,步进角度很小
MAX232: 1.符合所有的 RS-232C 技术标准
2.只需要单一 +5V 电源供电,片载电荷泵具有升压、电压极性反转
能力,能够产生+10V 和-10V 电压 V+、V-
3.功耗低,典型供电电流 5mA
4.内部集成两个 RS-232C 驱动器,两个 RS-232C 接收器
三、工作原理说明及计算
1、PC 机与单片机通信
在工业控制系统中,各种数据的采集和执行机构的控制都是由下位机来完成。由
于单片机具有体积小、价格低廉、可应用于恶劣工业环境的特点,在分布式控制系统
中大多采用单片机作为下位机来进行数据采集和现场控制。在这些应用中,单片机只
是直接面向被控对象底层。而对采集到的数据进行进一步分析和处理的工作是由功
能强大的主控 PC 机来完成的。因此,PC 机和单片机之间就有着大量的数据交换。
通常 PC 机和单片机之间的通信是通过串行总线 RS-232 实现的。因此采用一种
以 MAX232 为核心的通信接口电路。该接口电路适用于由一台 PC 机与多个单片机串
行通信的设计,其原理和方法同样适用于 PC 机与其它单片机之间的串行数据通信。