
16-735, Howie Choset, with slides from Ji Yeong Lee, G.D. Hager and Z. Dodds
Robotic Motion Planning:
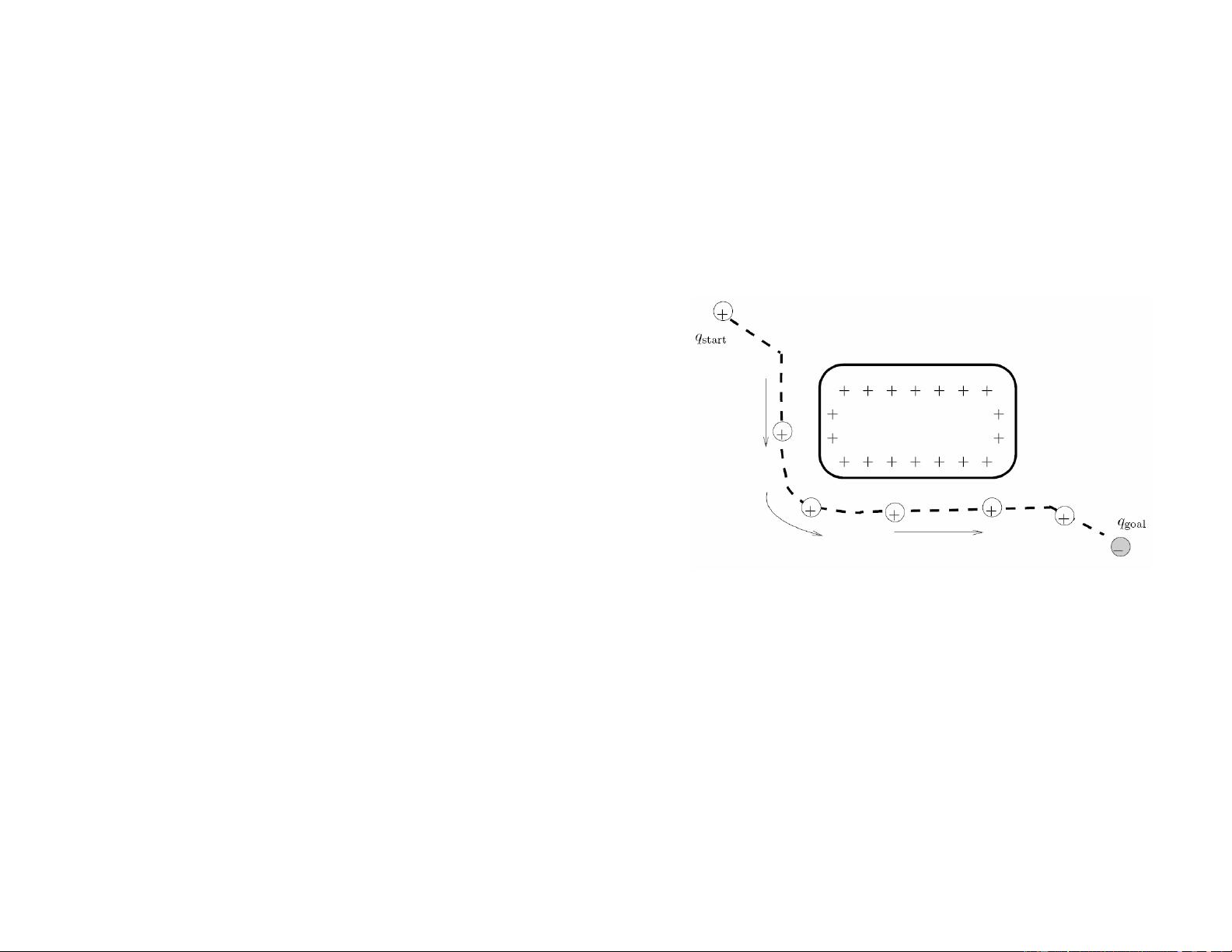
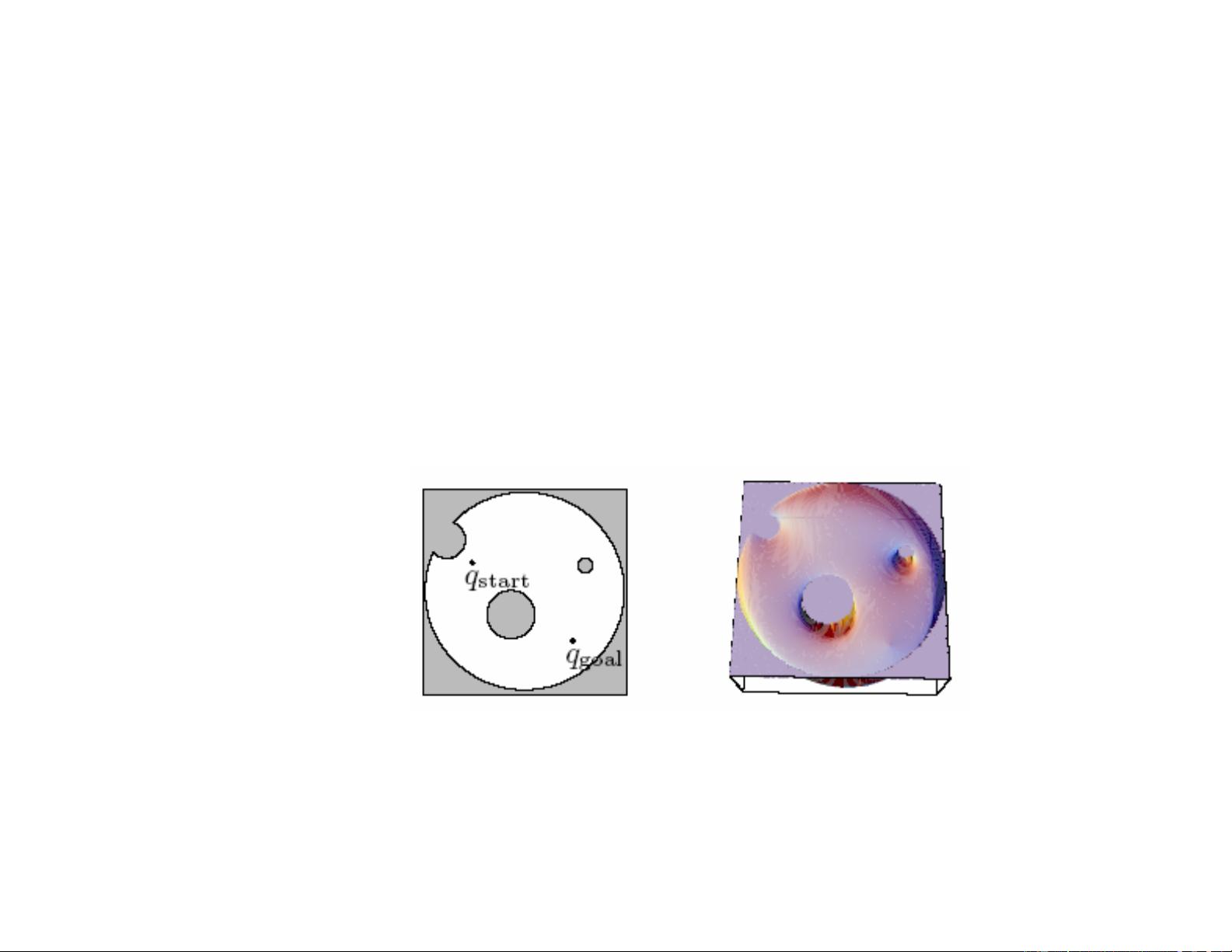
Potential Functions
Robotics Institute 16-735
http://voronoi.sbp.ri.cmu.edu/~motion
Howie Choset
http://voronoi.sbp.ri.cmu.edu/~choset

 路径规划 无人车 人工势场法 matlab m文件.7z (5个子文件)
路径规划 无人车 人工势场法 matlab m文件.7z (5个子文件)  人工势场法原理及matlab代码
人工势场法原理及matlab代码  main.m 3KB
main.m 3KB Chap4-Potential-Field_howie.pdf 1.25MB compute_repulsion.m 2KB compute_angle.m 604B compute_Attract.m 310B
Chap4-Potential-Field_howie.pdf 1.25MB compute_repulsion.m 2KB compute_angle.m 604B compute_Attract.m 310B
















评论2