






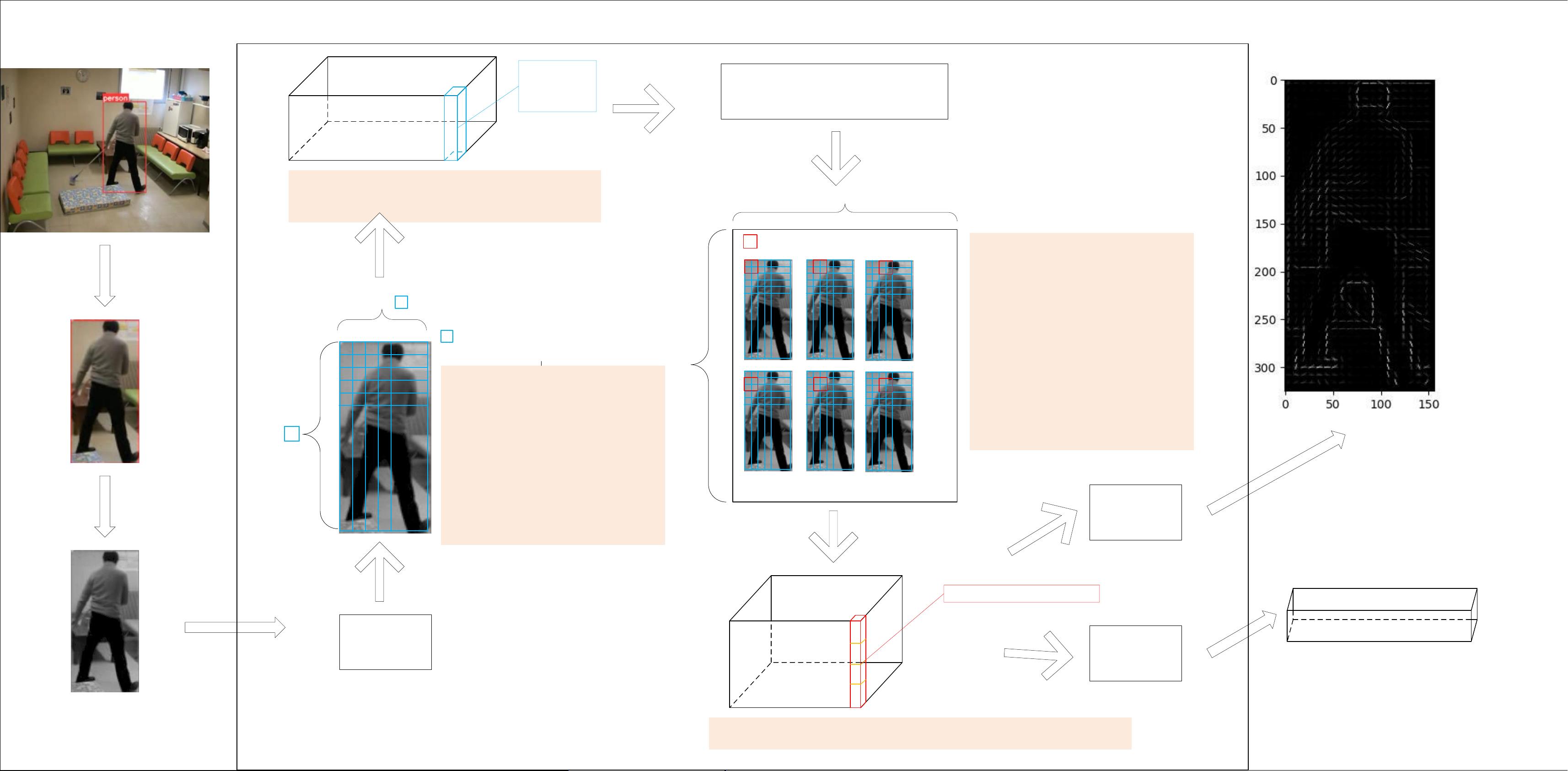
裁剪
灰度处理
归一化
伽马矫正
325*156*3
...
...
Cell(大小由参数pixels
_per_cell决定)
# 将0-180度划分为Orientations份
Orientations = 9
# 该图像的像素值
s_row = 325
s_col = 156
# 每个Cell占多少像素
c_row = 8
c_col = 8
# 每一行每一列有多少个Cell
n_cells_row = 325/8 = 40
n_cells_col = 156/8 = 19
19个19个
orientation_histogrm的大小:40*19*9
(n_cells_row*n_cells_col*Orientations)
一个cell存储的
直方图数据,9为
9个方向,值为某
方向的统计量
计算每个Cell上的直方图
...
...
...
...
...
...
...
...
...
...
...
...
...
...
Block
# cells_per_block决定几个cell
组成一个block
b_row = 2
b_col = 2
# Block横轴和纵轴上包含几个Cell
n_blocks_row
= (n_cells_row - b_row) + 1
= (40-2)+1 = 39
# 在一个横轴上遍历39次
n_blocks_col
= (n_cells_col - b_col) + 1
= (19-2)+1 = 18
# 在一个纵轴上遍历18次
1818
40个40个40个
393939
一个Block 由b_row*b_col个Cell组成。
hog_histograms = 39*18*4*9
(n_blocks_row*n_blocks_col*Orientations*b_row*b_col)
可视化
转换成一维
向量
将图片划分为多个Cell
创建“orientation_histogram”矩
阵,用于记录每个Cell的梯度直方图
遍历每个Block
记录每个Block的结果
的矩阵,同时进行归一
化,减少光照影响
325*156
25272*1













评论0