
Image-to-Image Translation with Conditional Adversarial Networks
Phillip Isola Jun-Yan Zhu Tinghui Zhou Alexei A. Efros
Berkeley AI Research (BAIR) Laboratory
University of California, Berkeley
{isola,junyanz,tinghuiz,efros}@eecs.berkeley.edu
Labels to Facade BW to Color
Aerial to Map
Labels to Street Scene
Edges to Photo
input output input
inputinput
input output
output
outputoutput
input output
Day to Night
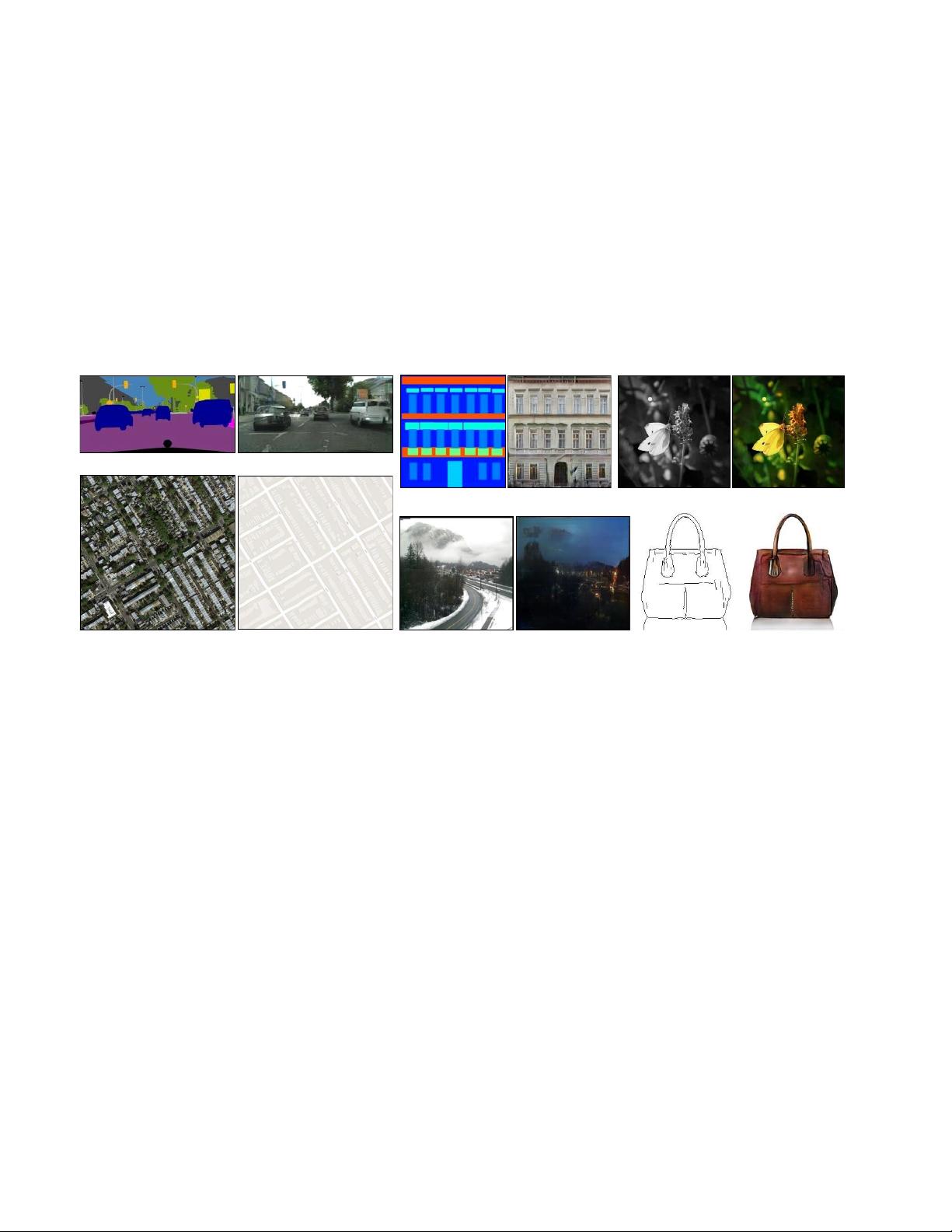
Figure 1: Many problems in image processing, graphics, and vision involve translating an input image into a corresponding output image.
These problems are often treated with application-specific algorithms, even though the setting is always the same: map pixels to pixels.
Conditional adversarial nets are a general-purpose solution that appears to work well on a wide variety of these problems. Here we show
results of the method on several. In each case we use the same architecture and objective, and simply train on different data.
Abstract
We investigate conditional adversarial networks as a
general-purpose solution to image-to-image translation
problems. These networks not only learn the mapping from
input image to output image, but also learn a loss func-
tion to train this mapping. This makes it possible to apply
the same generic approach to problems that traditionally
would require very different loss formulations. We demon-
strate that this approach is effective at synthesizing photos
from label maps, reconstructing objects from edge maps,
and colorizing images, among other tasks. As a commu-
nity, we no longer hand-engineer our mapping functions,
and this work suggests we can achieve reasonable results
without hand-engineering our loss functions either.
Many problems in image processing, computer graphics,
and computer vision can be posed as “translating” an input
image into a corresponding output image. Just as a concept
may be expressed in either English or French, a scene may
be rendered as an RGB image, a gradient field, an edge map,
a semantic label map, etc. In analogy to automatic language
translation, we define automatic image-to-image translation
as the problem of translating one possible representation of
a scene into another, given sufficient training data (see Fig-
ure 1). One reason language translation is difficult is be-
cause the mapping between languages is rarely one-to-one
– any given concept is easier to express in one language
than another. Similarly, most image-to-image translation
problems are either many-to-one (computer vision) – map-
ping photographs to edges, segments, or semantic labels,
or one-to-many (computer graphics) – mapping labels or
sparse user inputs to realistic images. Traditionally, each of
these tasks has been tackled with separate, special-purpose
machinery (e.g., [7, 15, 11, 1, 3, 37, 21, 26, 9, 42, 46]),
despite the fact that the setting is always the same: predict
pixels from pixels. Our goal in this paper is to develop a
common framework for all these problems.
1
arXiv:1611.07004v1 [cs.CV] 21 Nov 2016

剩余15页未读,继续阅读
资源评论


weixin_42157757
- 粉丝: 0
- 资源: 1









最新资源
- Go 中 JOSE 标准 (JWE、JWS、JWT) 的实现.zip
- 整理过后的蘑菇数据集.csv
- java仿win10界面的酒店管理系统源码数据库 MySQL源码类型 WebForm
- Go Twitter REST 和 Streaming API v1.1.zip
- tomcat跨域解决方案(亲测可用)
- Go Memcached 客户端库 #golang.zip
- Go Manager - Go 软件包.zip
- Futurice 开发人员针对 iOS 开发提出的好主意 .zip
- franz-go 包含一个功能齐全的纯 Go 库,用于与 Kafka 0.8.0 到 3.8+ 进行交互 生产、消费、交易、管理等 .zip
- STM32 HAL库 + LM2904运算放大器 + ADC + VDO温度传感器:电路设计及代码实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


