


内蒙古工业大学信息学院
目录
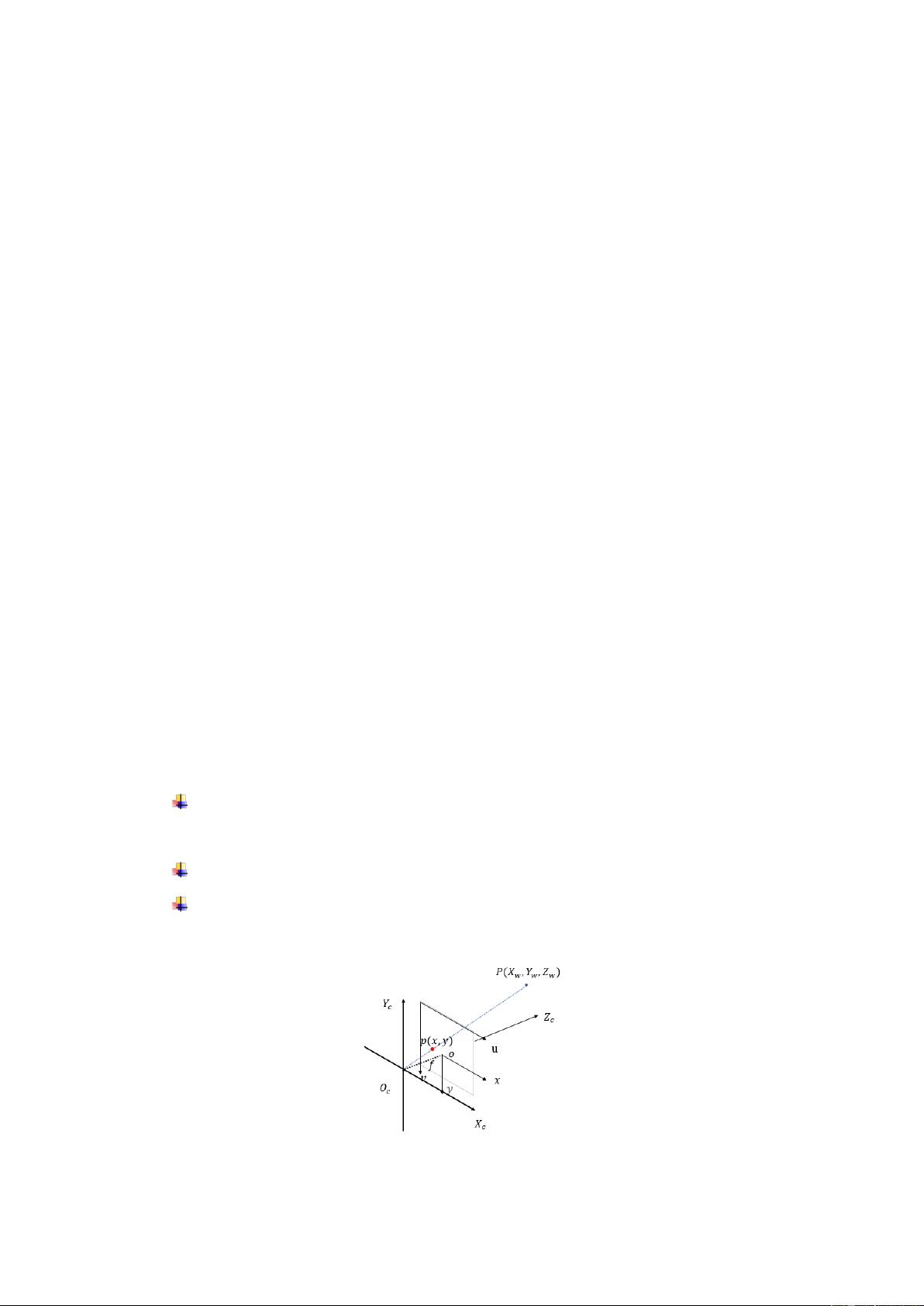
相机成像原理 ....................................................................................................... 1
step1:构造 rigbt()函数 ................................................................................ 2
step2:构造 proj()函数 ................................................................................. 3
step3:构造 pixel()函数 ............................................................................ 5
matlab 主程序 ............................................................................................... 6
扩展:............................................................................................................ 8
剩余9页未读,继续阅读






评论1
最新资源