


技
术
创
新
《微计算机信息》(测控自动化)2009 年第 25 卷第 11-
1
期
360
元
/
年 邮局订阅号
:
82-946
《现场总线技术应用 200 例》
软 件天 地
基于
OpenCV
的多视角视觉测量系统标定
Calibration for Multi-Angles Vision Measuring System Based on OpenCV
(
天津科技大学
)
李 旭 王永强 许增朴 于德敏
LI Xu WANG Yong-qiang XU Zeng-pu YU De-min
摘要
!
分析了线结构光式多视角视觉测量系统的标定方法
,
给出了基于开源视觉库
OpenCV
的多视角视觉测量系统标定算
法的 处理 流程
,
实现了一个完整的多视角视觉测量系统标定模块的开发
。
实验证明该方法简便
,
易行
。
关键词
!
摄像机标定
"
多视角
"
视觉测量系统
" #$%&’(
中图分类号
! )*+,-
文献标识码
! .
./012341!
The principle of camera calibration method for multi -angles vision measuring system is analyzed. The processing flow of
the calibration method is given based on Open Source Computer Vision library. The camera calibration software for multi-angles vi-
sion measuring system is realized. The experiment proves that the method is easy and user-friendly.
5%6 78290! ’3:%23 43;</231<8&" =>;1<?3&@;%0" (<0<8& :%30>2<&@ 0601%:" #$%&’(
文章编号
!-ABC?BDEBFGAA,H--I
-
?BGBJ?B+
-
引言
在线结构光多视角视觉测量系统应用中
,
系统标定通常是既
繁琐又关键的技术环节
,
由于算法复杂
,
目前还没有一种通用有
效的标准方法。由于
OpenCV
是一种开源计算机视觉库
,
实现了
大量通用算法
,
涉及到图像处理、摄像机标定等技术
,
因此
,
本文提
出并实现了基于
OpenCV
的多视角视觉测量系统标定方法。
G
标定的基本原理
2.1
线结构光视觉传感器的数学模型
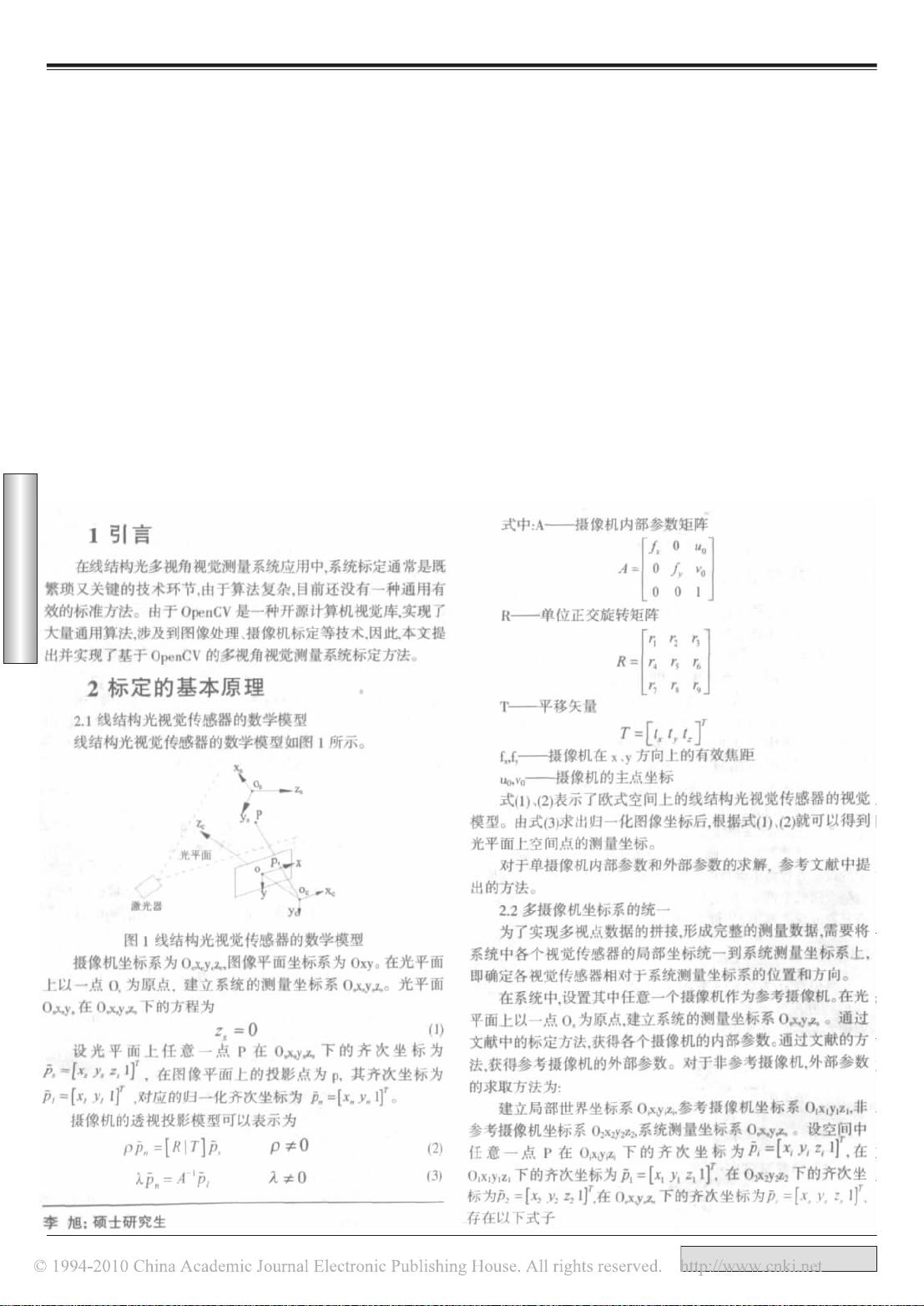
线结构光视觉传感器的数学模型如图
1
所示。
图
1
线结构光视觉传感器的数学模型
摄像机坐标系为
O
c
x
c
y
c
z
c
,
图像平面坐标系为
Oxy
。在光平面
上以一点
O
s
为原点
,
建立系统的测量坐标系
O
s
x
s
y
s
z
s
。光平面
O
s
x
s
y
s
在
O
s
x
s
y
s
z
s
下的方程为
(1)
设 光 平 面 上 任 意 一 点
P
在
O
s
x
s
y
s
z
s
下 的 齐 次 坐 标 为
,
在图像平面上的投影点为
p,
其齐次坐标为
,
对应的归一化齐次坐标为 。
摄像机的透视投影模型可以表示为
(2)
(3)
式中
:A
——
—
摄像机内部参数矩阵
R
——
—
单位正交旋转矩阵
T
——
—
平移矢量
f
x
,f
y
——
—
摄像机在
x
、
y
方向上的有效焦距
u
0
,v
0
——
—
摄像机的主点坐标
式
(1)
、
(2)
表示了欧式空间上的线结构光视觉传感器的视觉
模型。由式
(3)
求出归一化图像坐标后
,
根据式
(1)
、
(2)
就可以得到
光平面上空间点的测量坐标。
对于单摄像机内部参数和外部参数的求解
,
参考文献中提
出的方法。
2.2
多摄像机坐标系的统一
为了实现多视点数据的拼接
,
形成完整的测量数据
,
需要将
系统中各个视觉传感器的局部坐标统一到系统测量坐标系上
,
即确定各视觉传感器相对于系统测量坐标系的位置和方向。
在系统中
,
设置其中任意一个摄像机作为参考摄像机。在光
平面上以一点
O
s
为原点
,
建立系统的测量坐标系
O
s
x
s
y
s
z
s
。通过
文献中的标定方法
,
获得各个摄像机的内部参数。通过文献的方
法
,
获得参考摄像机的外部参数。对于非参考摄像机
,
外部参数
的求取方法为
:
建立局部世界坐标系
O
i
x
i
y
i
z
i
,
参考摄像机坐标系
O
1
x
1
y
1
z
1
,
非
参考摄像机坐标系
O
2
x
2
y
2
z
2
,
系统测量坐标系
O
s
x
s
y
s
z
s
。设空间中
任 意 一 点
P
在
O
i
x
i
y
i
z
i
下 的 齐 次 坐 标 为
,
在
O
1
x
1
y
1
z
1
下的齐次坐标为
,
在
O
2
x
2
y
2
z
2
下的齐次坐
标为
,
在
O
s
x
s
y
s
z
s
下的齐次坐标为
,
存在以下式子
李 旭
!
硕士研究生
204
- -













