
第27卷第2期
电力自动化设备
V01.27
No.2
2007年2月
Electric
P。wer
Automati。n
Equipment
Feb.2()07
①
动态电压恢复器的双前馈控制策略研究
史伟伟,唐国庆,李
俊
(东南大学电气工程系.江苏南京210096)
摘要:采用基于电网电压前馈的开环控制时,动态电压恢复器(DVR)动态响应速度快.但负载电压
受负载电流影响较大;用比例积分(PI)调节器实现闭环控制可以减小这一影响.但动态响应速度变
慢,且负载电压受电网电压影响变大。提出把负载电压看作DVR的控制对象。桥式电路中开关器件
的占空比看作控制量,电网电压和负载电流看作干扰量。根据数学模型分析出被控对象不仅受控制
量控制,而且受2个干扰量的影响。结合不同控制策略中控制量的计算方法,推导出各种控制策略
下系统的传递函数。分析可知系统存在稳态误差的原因在于2个干扰量的影响。基于此.提出同时
利用电网电压前馈和负载电流前馈的双前馈开环控制方法.既保持了开环控制动态响应速度快的
优点,也可基本消除电网电压和负载电流对负载电压的影响。为避免电流前馈微分环节噪声影响.
设计了用负载电压估计负载电流的估算方法。仿真结果验证了理论分析的正确性。
关键词:动态电压恢复器;电网电压前馈:负载电流前馈:稳态误差
中图分类号:TM
76l+.1
文献标识码:A
文章编号:1006—6047(2007)02一001l一05
0引言
近年来.电能质量问题日益严重.电压敏感性负
荷不断增加.使得电能质量改善装置的开发受到
了普遍关注。动态电压恢复器DVR(Dynamic
Voltage
Restorer)就是其中的一种,其主要优点在于
能有效补偿动态电能质量.从控制角度而言.DVR不
仅要求稳态误差小,而且要求动态响应速度快。为保
证动态性能.目前普遍采用开环控制[卜训。但开环控制
下,负载电压受负载电流影响较大,即存在稳态误差。
为减小稳态误差,可以采用闭环控制策略。文献[8]
采用了基于负载电流反馈的闭环控制策略.反馈采用
比例环节。文献[9]采用了基于负载电压反馈的闭
环控制。反馈采用比例积分(PI)环节。以上闭环方法
减小了系统稳态误差,但并不能完全消除稳态误差。
同时系统动态响应速度变慢。
本文把负载电压看作DVR的控制对象.桥式电
路中开关器件的占空比看作控制量.电网电压和负载
电流看作干扰量.根据数学模型可以分析出。被控对
象不仅受控制量控制,而且受2个干扰量的影响。结
合不同控制策略中控制量的计算方法.可以推导出
各种控制策略下系统的传递函数.根据传递函数可
以看出系统存在稳态误差的原因在于2个干扰量的
影响。基于此.确定了基于电网电压和负载电流双前
馈的基本控制思路。由于负载电流前馈需要微分环
节。为避免微分环节产生噪声,所以提出了用负载电
压估计负载电流的估算方法。利用此估算方法。建立
了完整的双前馈控制方法。最后。通过仿真验证了该
收稿日期:2006—05一12
基金项目:江苏省博士后科研资助计划(1660631105);江苏省
教育厅自然科学基金(04Ⅺ13470010)
方法的正确性。并通过和传统控制方法的对比分析验
证了该方法的优越性。
l
DVR数学模型
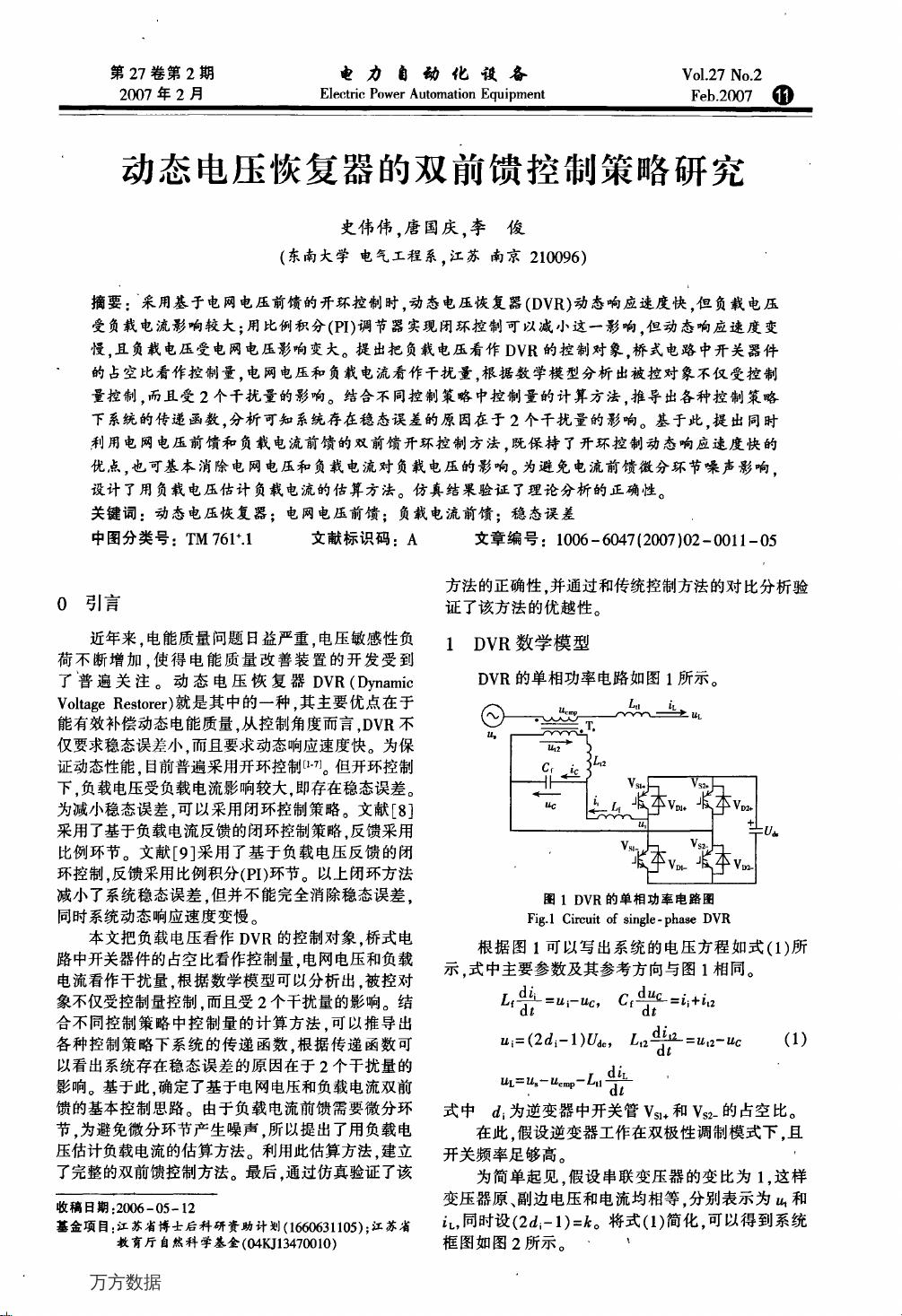
DVR的单相功率电路如图1所示。
图1
DVR的单相功率电路图
Fig.1
Circuit
of
sin垂e-phase
DVR
根据图l可以写出系统的电压方程如式(1)所
示。式中主要参数及其参考方向与图1相同。
£f詈跏广阮,cf罟毛;+武2
Hi=(2di一1)砜。,
厶。2旦手}=u。2一毗
(1)
U‘
J二
uL=M。一Ⅱ。砷一£tl-号}
U‘
式中d;为逆变器中开关管Vs。+和Vs2一的占空比。
在此.假设逆变器工作在双极性调制模式下,且
开关频率足够高。
’
为简单起见,假设串联变压器的变比为1,这样
变压器原、副边电压和电流均相等,分别表示为地和
i。,同时设(2di一1)=后。将式(1)简化,可以得到系统
框图如图2所示。
、
万方数据
资源评论


普通网友
- 粉丝: 484
- 资源: 1万+









最新资源
- 跨平台开发指南-YOLOv11在Android、iOS端实时检测落地实践.pdf
- 跨平台开发指南-YOLOv11模型转ONNX及移动端部署最佳实践.pdf
- MATLAB实现IBES-ELM基于改进的秃鹰搜索优化算法优化极限学习机的数据回归预测 (含模型描述及示例代码)
- 跨域迁移学习-YOLOv11在极地科考中的冰雪目标快速适配方案.pdf
- 零基础入门YOLOv11-从PyTorch训练到ONNX跨平台部署全流程.pdf
- 跨行业应用-YOLOv11在野生动物追踪与生态监测中的创新实践.pdf
- 零售场景深度应用-YOLOv11实现货架商品识别与库存动态管理.pdf
- 零售盗窃预防-YOLOv11实时异常行为检测与报警联动方案.pdf
- 零售场景落地-YOLOv11多目标顾客行为分析与货架陈列优化系统(新零售).pdf
- 零售货架管理-YOLOv11缺货检测与SKU匹配自动化系统设计.pdf
- 零售货架管理-YOLOv11商品缺货预警与陈列合规性检测模型部署.pdf
- 零售货架管理-YOLOv11商品缺货检测与陈列合规性自动审核.pdf
- 零售结算革命-YOLOv11多商品并行识别与自动计价技术实现.pdf
- 零售货架智能管理-YOLOv11商品缺货检测与补货提醒.pdf
- 零售结算革命-YOLOv11+RFID融合的无人便利店商品识别方案.pdf
- 零售收银升级-YOLOv11商品自动识别与价格结算系统开发.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


