
http://www.paper.edu.cn
-1-
中国科技论文在线
基于光电传感器的智能寻迹车的设计与实现
马春城,郭循钊
长安大学交通信息工程及控制系, 西安 (710064)
E-mail
: napolun_111@163.com
摘 要:本设计智能寻迹车的路径信息是通过光电传感器来识别。对于光电传感器,信号的
采集一般采用二值化处理,即常见的路径离散识别算法。然而此类识别模式会丢掉大量的路
径信息。连续式算法,可以使赛车在垂直赛道的不同位置上,传感器能给出与之对应的唯一
输出,这样就极大地提高路径探测精度。设计从系统整体分析入手,从机械结构,硬件电路,
控制策略软件等方面进行考虑,调整和改装智能车车模的一些部分,分模块进行硬件电路的
设计。系统转向和速度的控制策略采用简单而有效的 PID 算法。结果证明智能车能够沿着
路径引导线快速、流畅和稳定地行驶。
关键词:智能车;路径识别;PID 控制;光电传感器
中图分类号: TP368.1 文献标识码: A
1 引言
智能车辆是当今车辆工程领域研究的前沿,它体现了车辆工程、人工智能、自动控制、
计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势
[1]
。本文所述的智能
寻迹车系统基于MC9S12DG128 单片机开发与实现,系统采用连续化路径识别算法,自动控
制小车前进和转向,从而实现快速稳定的寻线行驶。为保证智能车在行驶过程具有良好的操
稳性和平顺性,控制系统对转向舵机控制和直流电机驱动控制提出了较为理想的解决方案。
2 系统总体设计
以单片机 MC9S12DG128 为核心,配有传感器、电机、舵机、电池以及相应的驱动电路,
能够自主识别路径,控制智能模型车能够自主识别引导线并高速稳定地行驶在跑道上。
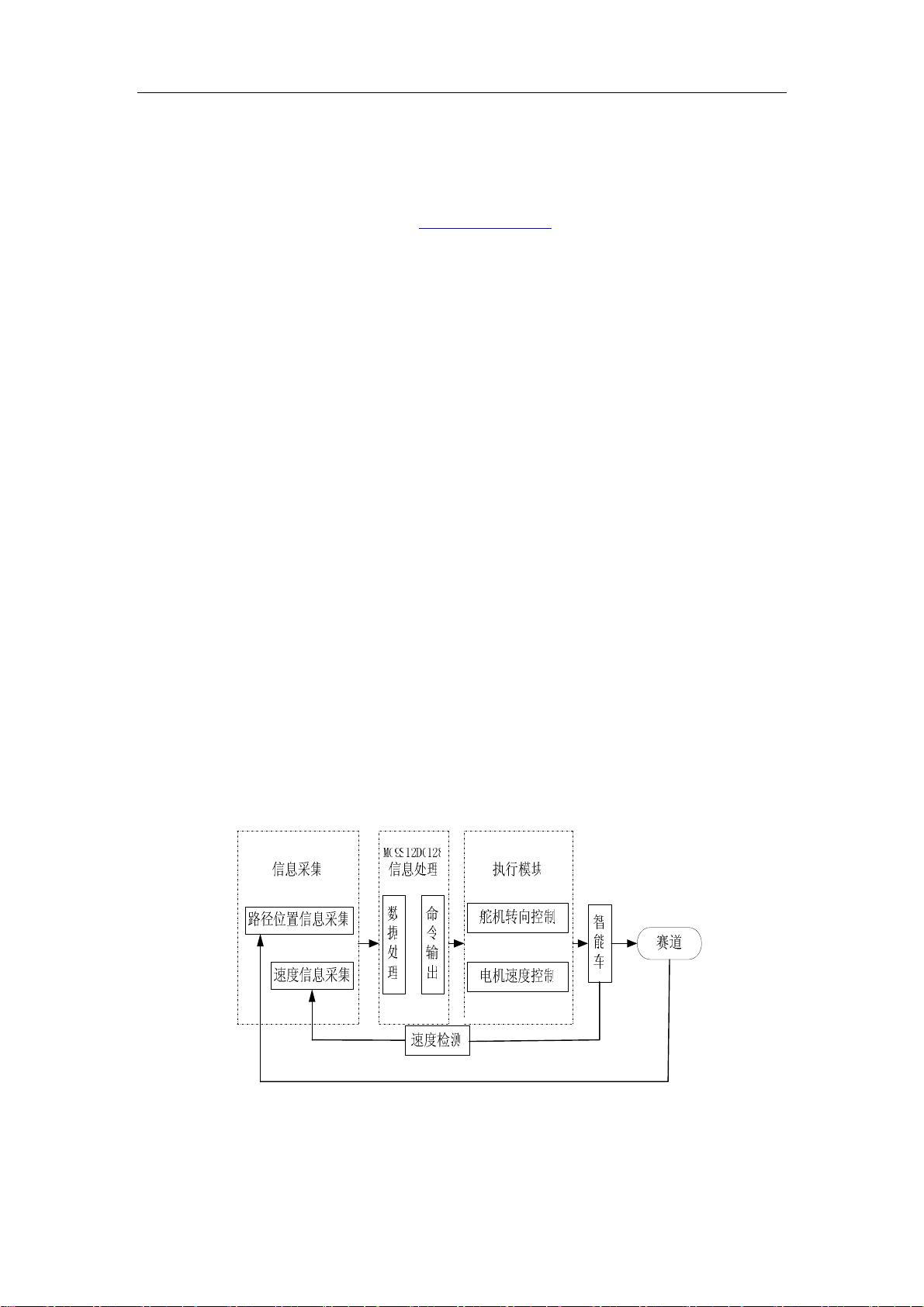
智能寻迹车系统实际上就是两输入两输出的自动控制系统,如图 1 所示。输入是赛道信
息(即车身中心距黑线的垂直距离)和反馈的实时速度信息,输出是舵机转向控制输出和直
流电机速度控制输出。输入的信息经过控制中心的处理生成控制决策,然后通过输出来控制
智能车的转向和速度。各部分协调工作,可以整个系统稳定、快速地自动寻迹
[2]
。
图 1 系统框图
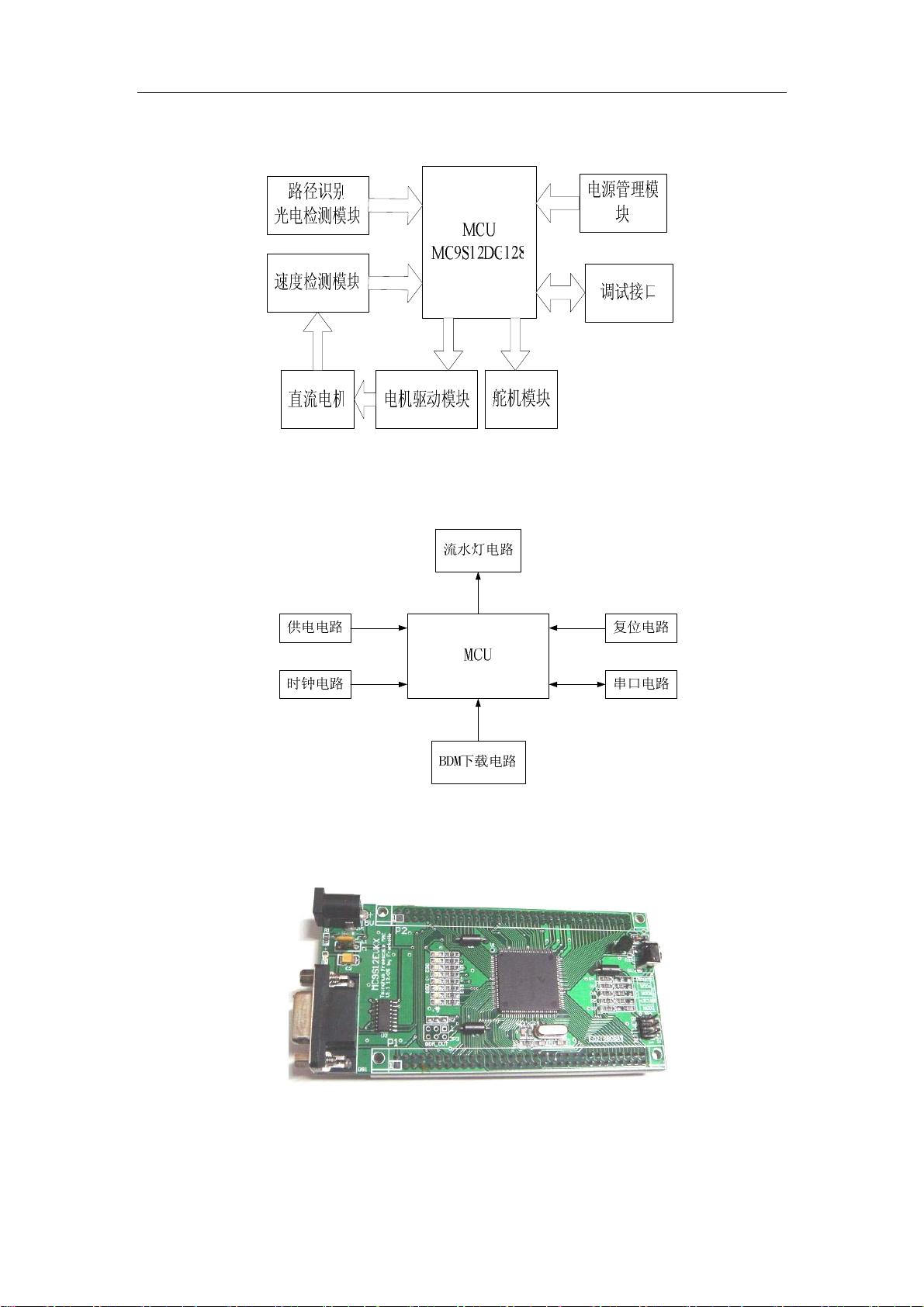
3 硬件设计
智能车系统的硬件部分以 MC9S12DG128B 为核心,有电源管理模块,路径信息识别模
剩余8页未读,继续阅读






评论0
最新资源