labview-environment.pdf

需积分: 0 152 浏览量
更新于2024-02-25
收藏 917KB PDF 举报
### LabVIEW环境设置详解
#### 一、LabVIEW概述与虚拟仪器(VI)
LabVIEW是一种图形化编程语言,被广泛应用于工程和科学领域中的数据采集、分析、显示以及存储等任务。LabVIEW程序被称为虚拟仪器(VIs),这是因为它们的设计理念和操作方式模仿了实际的物理仪器,例如示波器和多用表。
#### 二、VI的基本组成部分
当创建一个新的VI时,会看到两个主要部分:前端面板(front panel)和块图(block diagram)。
##### 1. 前端面板(Front Panel)
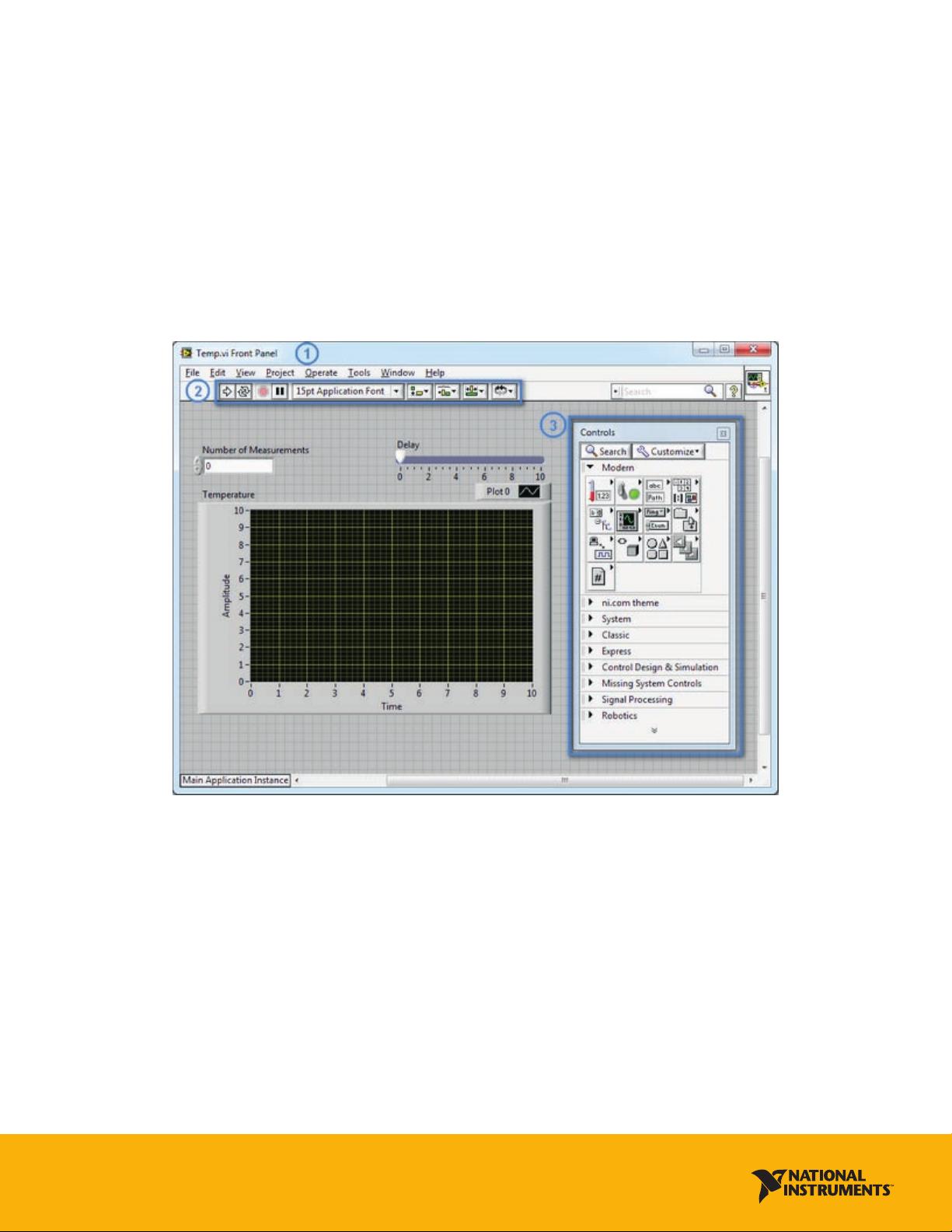
前端面板是VI的用户界面。它展示了用于输入数据的控件和用于显示输出结果的指示器。前端面板的设计旨在模拟实际物理仪器的操作面板。例如,在图1中展示了一个前端面板窗口,可以看到包含各种控件的工具栏以及控件调色板。
**图1:前端面板窗口、工具栏和控件调色板**
前端面板上通常会有以下组件:
- **控件(Control)**:如数字旋钮、按钮等,用于接收用户的输入。
- **指示器(Indicator)**:如图表、LED灯等,用于显示VI处理后的结果。
##### 2. 控件调色板(Controls Palette)
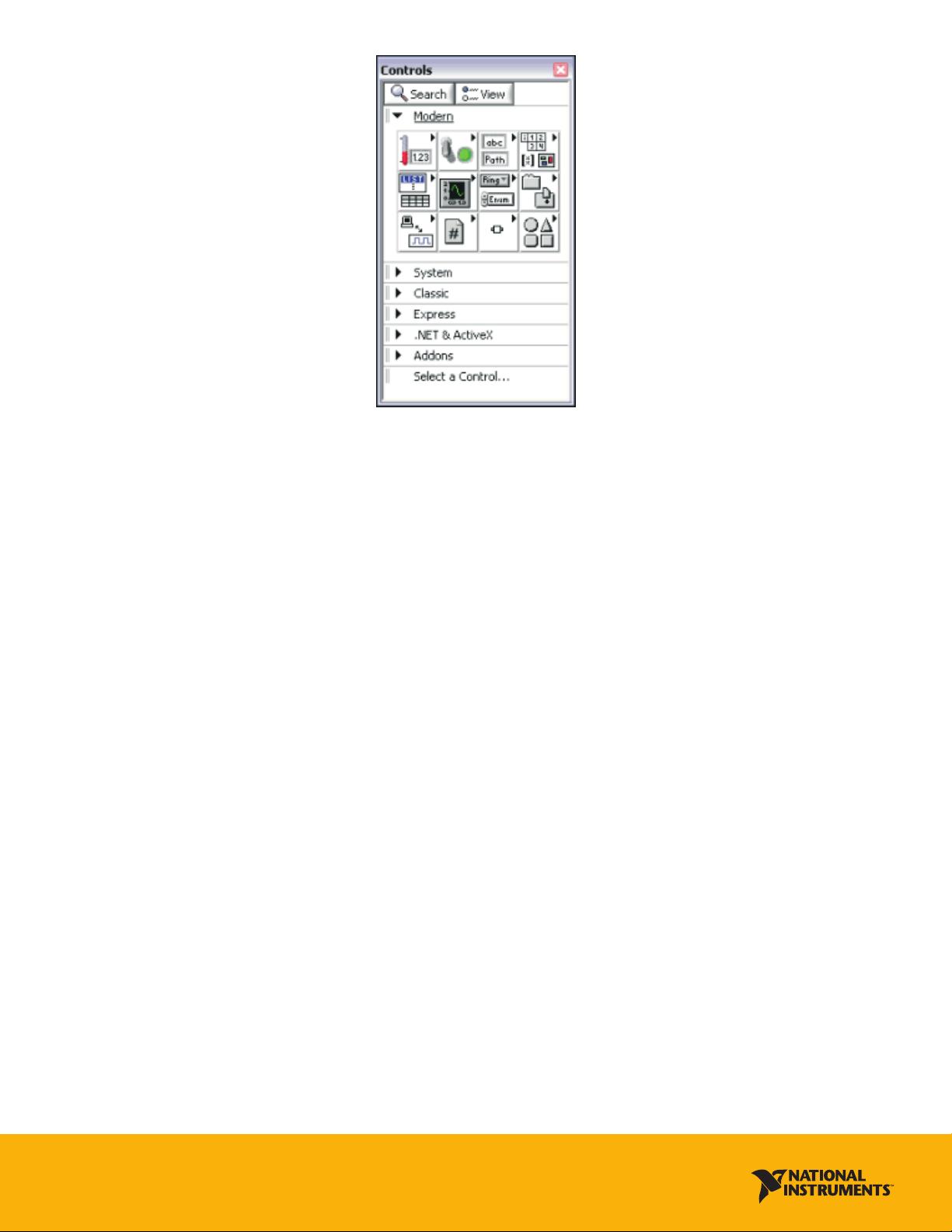
控件调色板包含了创建前端面板所需的各类控件和指示器。可以通过选择“查看(View)”菜单中的“控件调色板(Controls Palette)”选项或右击前端面板上的空白区域来访问控件调色板。控件调色板被分为多个类别,可以根据需要显示其中的一部分或全部。在图2中,展示了一个具有所有类别可见的控件调色板,并且“现代(Modern)”类别已被展开。
**图2:控件调色板**
为了查看或隐藏类别(子调色板),可以选择调色板上的“查看(View)”按钮并选择或取消选择“始终可见类别(Always Visible Categories)”选项。
#### 三、控件和指示器的使用
在创建前端面板时,需要使用控件和指示器来构建交互式的输入和输出终端。控件模拟了仪器的输入设备,可以向VI的块图提供数据;而指示器则模拟了仪器的输出设备,用于显示块图所获取或生成的数据。
例如,在图1中的前端面板有两个控件:“测量次数(Number of Measurements)”和“延迟(Delay)”。
- **测量次数(Number of Measurements)**:用户可以通过此控件设定进行多少次数据采集。
- **延迟(Delay)**:该控件允许用户设置两次测量之间的间隔时间。
这些控件和指示器是构成LabVIEW程序的重要元素,它们使得用户能够与VI进行交互,同时也使得VI能够呈现处理后的数据。
通过以上介绍,可以看出LabVIEW环境设置主要包括了前端面板设计和控件调色板的使用。掌握这些基本概念对于使用LabVIEW开发高效、可靠的虚拟仪器至关重要。
ni.com/students/learnlabview
NI LabVIEW Environment: Detailed Explanation
Virtual Instruments (VIs)
LabVIEW programs are called virtual instruments, or VIs, because their appearance and operation imitate physical
instruments, such as oscilloscopes and multimeters. LabVIEW contains a comprehensive set of tools for
acquiring, analyzing, displaying, and storing data as well as tools to help you troubleshoot the code you write.
When you create a new VI, you see two windows: the front panel window and the block diagram.
Front Panel
When you open a new or existing VI, the front panel window of the VI appears. The front panel window is the
user interface for the VI. Figure 1 shows an example of a front panel window.
Figure 1. Front Panel Window, Toolbar, and Controls Palette
Controls Palette
The Controls palette contains the controls and indicators you use to create the front panel. You access the
Controls palette from the front panel window by selecting View >> Controls Palette or by right-clicking on any
empty space in the front panel window. The Controls palette is broken into various categories; you can expose
some or all of these categories to suit your needs. Figure 2 shows a Controls palette with all of the categories
exposed and the Modern category expanded.
剩余8页未读,继续阅读
2022-09-22 上传
105 浏览量
2022-04-26 上传
115 浏览量
185 浏览量
191 浏览量
2022-07-15 上传
106 浏览量
2021-07-23 上传
2020-09-10 上传
2022-09-21 上传
2010-09-14 上传
2022-09-23 上传
2022-09-21 上传
175 浏览量
资源评论


AI普惠行者
- 粉丝: 1715
- 资源: 146









最新资源
- 基于Comsol三次谐波的物理现象,大子刊NC复现报告:手性BIC超表面下的远场偏振与手性透射图示分析-电场、二维能带图解读及Q因子图展现所见即所得的光学效应 ,平面手征超表面研究:连续介质中的三次
- 人工智能&深度学习:LSTM 文本分类实战 - 基于 THUCNews 数据集的 Python 源码资源(源码+数据集+说明)
- MATLAB程序专为非全向移动机器人设计的扩展卡尔曼滤波(EKF)数据处理工具箱,精准融合ADS-B与GPS数据,高效状态估计解决方案,MATLAB程序优化:非全向移动机器人EKF状态估计与飞行数据处
- 简易图像处理软件,与PS工具类似
- iOS swift工具类使用
- AR.js 完整资源包,可以完整的引用
- 西门子PLC与三台欧姆龙温控器通讯程序:实现温度控制及监控,支持轮询通讯与故障恢复功能,PLC与触摸屏集成设置温度,支持扩展及详细注释 ,西门子PLC与三台欧姆龙温控器通讯程序:实现温度控制及监控,支
- 这份文档的内容并非技术性文章,而是一段歌词片段,无法按照技术文档的要求生成标准标题 若需要总结,该文档包含了一段歌词,表达了关于期待与未知相遇的主题 但由于内容不足以及非技术性质,无法提供更详细总
- .safetensors转换成.GGUF所需工具cmake
- 三相光伏并网逆变器仿真:PV升压逆变并网系统中的电压电流双环控制与SVPWM策略研究,三相光伏并网逆变器仿真研究:PV光伏boost升压逆变并网系统之电压外环与电流内环SVPWM控制机制探讨,三相光伏
- 《基于信捷PLC的7轴伺服插补联动设备的设计与实现-喷涂机程序与牵引示教功能》,信捷PLC驱动7轴伺服插补联动设备-XD5-48T6-E牵引示教功能与喷涂机程序解析,信捷PLC7轴伺服插补联动XD
- MPC模型预测控制:从原理到代码实现,涵盖双积分、倒立摆、车辆运动学与动力学跟踪控制系统的详细文档与编程实践,MPC模型预测控制原理到代码实现:双积分、倒立摆、车辆运动学与动力学跟踪控制案例详解,mp
- 车路协同C-V2X港口应用分析
- gradle-6.1.1.zip资源下载
- 用dockerfile打包带有nginx-monitor-vts模块的nginx镜像
- .safetensors转换成.GGUF所需工具ccache
