
基于 CPLD 的步进电机控制器设计
王海华,宋蕾
辽宁科技大学电信学院 114051
摘要:本文设计了一种基于CPLD的步进电机控制系统。它以CPLD作为核心器件,极大地减少了外围元件的
使用。具有系统扩展性能好、可靠性高、抗干扰能力强、结构简单、成本低廉,不占用CPU时间、易于高速
控制等优点。
关键词:步进电机,控制器,CPLD
中图分类号:TP393 文献标识码:A
The designing of the stepper motor controlled by the CPLD
Wang Haihua ,Song Lei
University of Science and Technlogy Liaoning 114044
Abstract:This paper devices a kind of control system of the stepper motor based upon CPLD. As the core of the
device, CPLD implements the most logic functions and minimizes the peripheral components. The distinctive
advantages of the system are expandable, stable, simple, lowly-cost and changing functions on system without
occupying CPU time etc.
Keywords:Stepping motor,Controller,CPLD
1、前言
步进电机可在宽广的频率范围内通过改变脉冲频率实现调速、快速起停、正反转控制等,
由其组成的开环系统简单、可靠,因此它被广泛的运用于数控机床、自动记录仪、工业机器
人、无损检测等系统中,步进电机的性能很大程度上取决于其控制系统
[1]
。基于CPLD的步
进电机控制系统
[2]
具有I/O端口多,可自由编程定义其功能等特点,大大缩减了电路的体积、
提高电路的稳定性。先进的开发工具使整个系统的设计调试周期大大缩短。利用VHDL语言
进行软件编程,通过EDA设计软件对程序编译、优化、综合、仿真、适配,可以对步进电
机控制实现数字输入。系统外围电路设计相对简单、可靠,且鉴于CPLD和VHDL语言自身
的特点,系统具有较好的扩展性,在控制系统中也具有一定的通用性。
2、系统设计方案
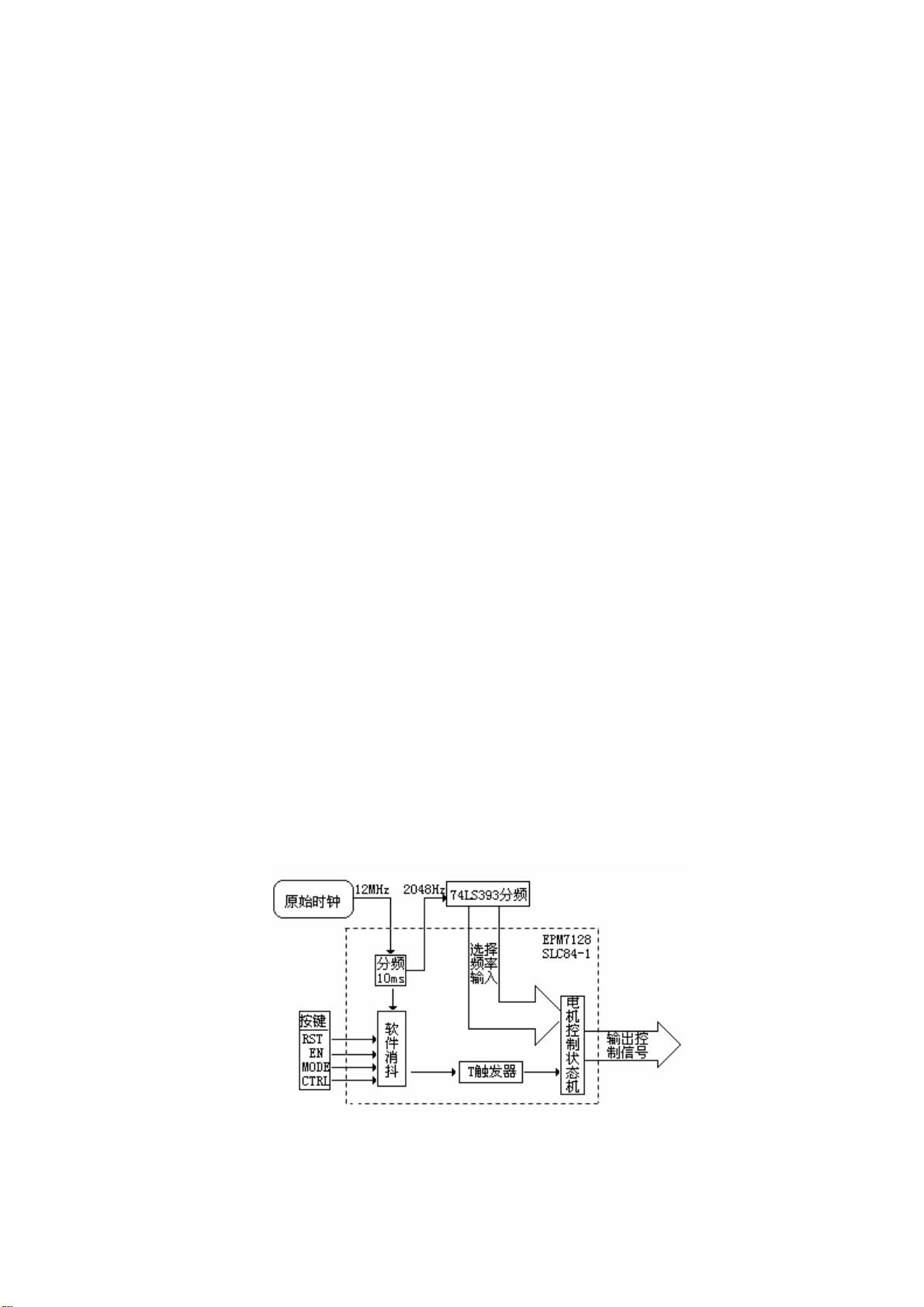
如图 1 所示。首先输入原始时钟信号,经过分频器得到 10ms 按键判断周期和频率为
2048Hz 的时钟信号,2048Hz 的信号经过外部硬件分频以后输入芯片,作为电机的转速信号。
由按键输入四个控制信号,和电机的转速频率信号一起送入电机控制状态机,由状态机根据
不同的输入来选择电机输出控制信号。
图 1 系统设计框图
3、系统硬件设计
资源评论


weixin_38743968
- 粉丝: 404
- 资源: 2万+









最新资源
- 基于Comsol三次谐波的物理现象,大子刊NC复现报告:手性BIC超表面下的远场偏振与手性透射图示分析-电场、二维能带图解读及Q因子图展现所见即所得的光学效应 ,平面手征超表面研究:连续介质中的三次
- 人工智能&深度学习:LSTM 文本分类实战 - 基于 THUCNews 数据集的 Python 源码资源(源码+数据集+说明)
- MATLAB程序专为非全向移动机器人设计的扩展卡尔曼滤波(EKF)数据处理工具箱,精准融合ADS-B与GPS数据,高效状态估计解决方案,MATLAB程序优化:非全向移动机器人EKF状态估计与飞行数据处
- 简易图像处理软件,与PS工具类似
- iOS swift工具类使用
- AR.js 完整资源包,可以完整的引用
- 西门子PLC与三台欧姆龙温控器通讯程序:实现温度控制及监控,支持轮询通讯与故障恢复功能,PLC与触摸屏集成设置温度,支持扩展及详细注释 ,西门子PLC与三台欧姆龙温控器通讯程序:实现温度控制及监控,支
- 这份文档的内容并非技术性文章,而是一段歌词片段,无法按照技术文档的要求生成标准标题 若需要总结,该文档包含了一段歌词,表达了关于期待与未知相遇的主题 但由于内容不足以及非技术性质,无法提供更详细总
- .safetensors转换成.GGUF所需工具cmake
- 三相光伏并网逆变器仿真:PV升压逆变并网系统中的电压电流双环控制与SVPWM策略研究,三相光伏并网逆变器仿真研究:PV光伏boost升压逆变并网系统之电压外环与电流内环SVPWM控制机制探讨,三相光伏
- 《基于信捷PLC的7轴伺服插补联动设备的设计与实现-喷涂机程序与牵引示教功能》,信捷PLC驱动7轴伺服插补联动设备-XD5-48T6-E牵引示教功能与喷涂机程序解析,信捷PLC7轴伺服插补联动XD
- MPC模型预测控制:从原理到代码实现,涵盖双积分、倒立摆、车辆运动学与动力学跟踪控制系统的详细文档与编程实践,MPC模型预测控制原理到代码实现:双积分、倒立摆、车辆运动学与动力学跟踪控制案例详解,mp
- 车路协同C-V2X港口应用分析
- gradle-6.1.1.zip资源下载
- 用dockerfile打包带有nginx-monitor-vts模块的nginx镜像
- .safetensors转换成.GGUF所需工具ccache
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


