水下机器人的设计与结构涵盖了从概念提出到最终施工设计的整个过程。在设计开始之前,需要由国家计划部门或用户基于国民经济或国防需求提出设计研制新潜水器的概念,并通过技术部门进行论证。设计任务书是整个设计过程的核心文件,它详细规定了潜水器的使命任务、主要装备和人员配置、排水量和主尺度、主要技术性能、主要设备、装置和系统、使用条件和要求等。这些内容包括但不限于航速、续航力、自持力、航行海区、最大下潜深度、工作深度、航行状态、环境条件(海区、海情、盐度、透明度、温度和密度梯度等)、后勤保障条件(母船、起吊回收方式、运输、运载方式以及储存方式)、观察能力、作业能力、水下抗水流能力、潜水员水下出入能力、水下对接和人员物质干转移能力等。
在概念论证和设计任务书确定之后,设计师需要提出实施步骤,利用计算机辅助设计程序进行多方案设计要素的估算和分析比较,以评价任务书各项要求的可行性和经济性。经过这一步骤,可以得出一个或多个可行的设计方案。然后,根据选定的设计方案进行总体布置的初步设计,包括绘制基本图纸、型线图、总布置草图,进行静水力和重量研究,以及流体动力试验(如阻力、推进、操纵和适航性试验),同时进行航速和续航力、动力负荷和稳性估算和研究。初步设计阶段对于潜水器的主要性能和特性有着决定性的影响。
在此基础上,技术设计阶段的主要任务是把初步设计发展成可供制造厂或承包商遵循或投标使用的图纸和技术文件。这些技术文件通常包括潜水器的主要图纸、总说明书、计算说明书以及主要试验研究报告。完成技术设计后,潜水器设计工作通常认为已经完成。
最终是施工设计阶段,这个阶段基于技术设计提供的图纸和文件,结合建造厂的设备条件和加工工艺特性,完成施工图纸和工装设计,并编制潜水器系泊试验和航行试验大纲以及设备的验收和安装试验要求等文件。施工设计通常由制造厂来完成,但在小型潜水器项目中,设计单位也可以承担这一工作。
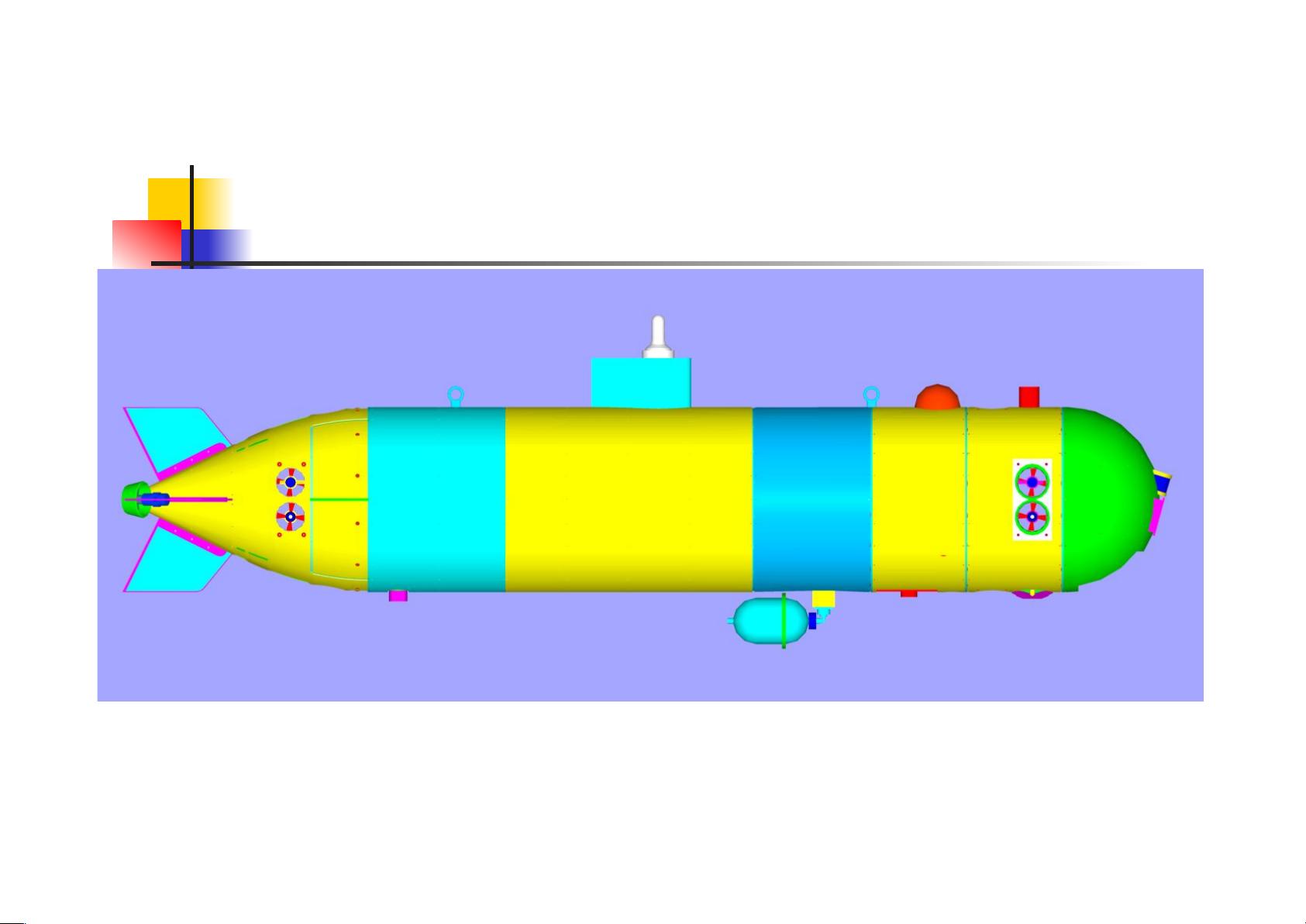
在具体结构设计方面,水下机器人的组成通常包括载体、观通系统和控制系统。载体可采用开架式或流线体设计,而观通系统一般由各类传感器构成,用于感知外界环境。控制系统负责运动和作业系统的控制。在材料选择上,水下机器人的设计需要考虑材料的强度和主尺度,以及水下机器人的运动自由度、航速、持续工作时间、摄像机间距调节系统工位、扫描声纳工作范围、紧急情况下的自动上浮能力等因素。如设计水深达到1000米,航速范围为0-2m/s,水下持续工作时间能够达到8小时,摄像机间距调节系统工位为800mm,扫描声纳工作范围为360度等。
总体而言,水下机器人的设计是一个复杂而详尽的工程,需要综合考虑技术、环境、安全等多方面因素,并通过多个设计阶段逐步完善。每个阶段都必须确保设计方案在技术上可行、经济上合理,并符合安全标准和要求。设计过程中涉及的各个技术文件,从任务书到施工设计图纸,都是保证潜水器最终质量和功能的关键。