
双臂单腿跳跃机器人的实时控制技术研究双臂单腿跳跃机器人的实时控制技术研究
与倒立摆相似,单腿跳跃机器人是自然不稳定系统,在实际的规划与控制中,需要保证控制的实时性。
与倒立摆相似,单腿跳跃机器人是自然不稳定系统,在实际的规划与控制中,需要保证控制的
Windows系统本身不是实时操作系统,但是,对于采用上/下位机模式(如PC+DSP)的
针对单腿跳跃机器人控制的要求,重点研究了实时控制技术,并给出具体
1 机器人控制系统的搭建机器人控制系统的搭建
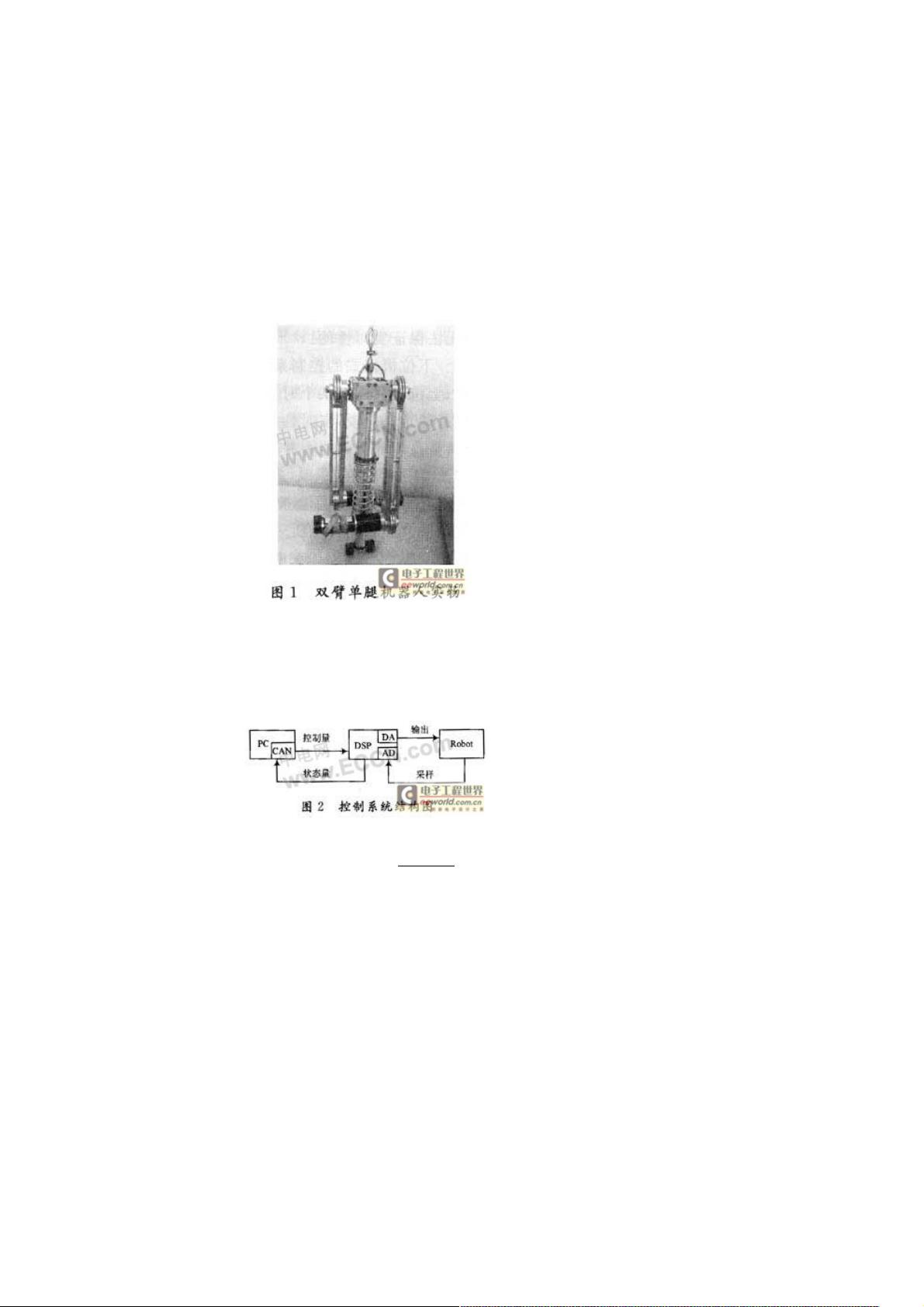
本文所研究的是一种新型弹性单腿机器人,该机器人采用双臂驱动,弹性伸缩腿中不安装驱动部件,系统依靠内部动力学
耦合实现动态站立平衡、起跳和稳定连续跳跃。其机械本体如图1所示。
两个直流伺服电机安装在机器人的臂端,电机的输出经由钢丝传到机器人肩部,从而实现臂的摆动。电机自带编码器,测
臂的摆角;机器人肩部装有陀螺仪,测身体的倾角;腿部有一直线位移传感器,用以测腿的伸缩长度。
考虑到本双臂单腿跳跃机器人主要为研究先进控制理论和方法提供实验平台,其控制系统采用上/下位机的模式,主要由
PC机、DSP(Digital Signal Processor)及机器人本体上的各传感器组成,系统的结构框图如图2所示。
PC与DSP之间通过CAN总线来通信。CAN适配卡采用周立功公司的PCI9810。PC作为上位机可充分利用其现有的软件工
具和开发环境,方便实现多任务管理;DSP(TI公司的TMS320)作为下位机则利用其高速运算和精确定时。
2 Windows下的实时控制下的实时控制
这里希望在目前使用最广的Windows平台上开发实时控制软件,以充分发挥其图形功能和丰富的软硬件支持,减少开发难
度,提高软件的通用性。所以在上位机采用的操作系统仍然是Windows系统。
但是,Windows并非一种实时操作系统,或者仅能称为“弱实时”。他是基于消息驱动机制的操作系统,一旦计算机的CPU被
某个进程占用,或系统资源紧张时,任何其他消息或进程都将被暂时挂起而无法实时处理。
所谓实时,就是要在特定的时间间隔内完成特定的任务。参考二级倒立摆控制周期(6~10 ms)和Raibert的SLIP跳跃机器人
控制周期(6 ms),把控制周期定为5 ms。
2.1 控制方案控制方案
精确定时是实时控制中的关键指标,若不对操作系统进行扩展,Windows能达到的定时精度最高仅为1 ms,受其他任务干
扰时精度会更低。如果仅用PC控制机器人,是无法保证实时性的。
然而,对于上/下位机模式的控制系统,定时精度可以由下位机来保证,上位机只需在某个时间范围内完成任务并响应即
可。从某种意义上说,实时性其实是一个靠近下位的概念,生物具有高超的协调能力并不总需处于最上位的大脑的时刻关注。
大脑也是个多任务系统,他总会被其他的事情干扰,但要进行某一控制时,他须具备2点:
(1)及时响应;






评论0
最新资源