

http://www.paper.edu.cn
基于扭矩测量的交流伺服工作台摩擦建模与仿真研究
1
张涛 路长厚 李泉
(山东大学机械工程学院 济南 250061)
摘要
:摩擦是影响 XY 交流伺服工作台定位精度的重要因素,有效地得到摩擦力信号是研究工作的基础。
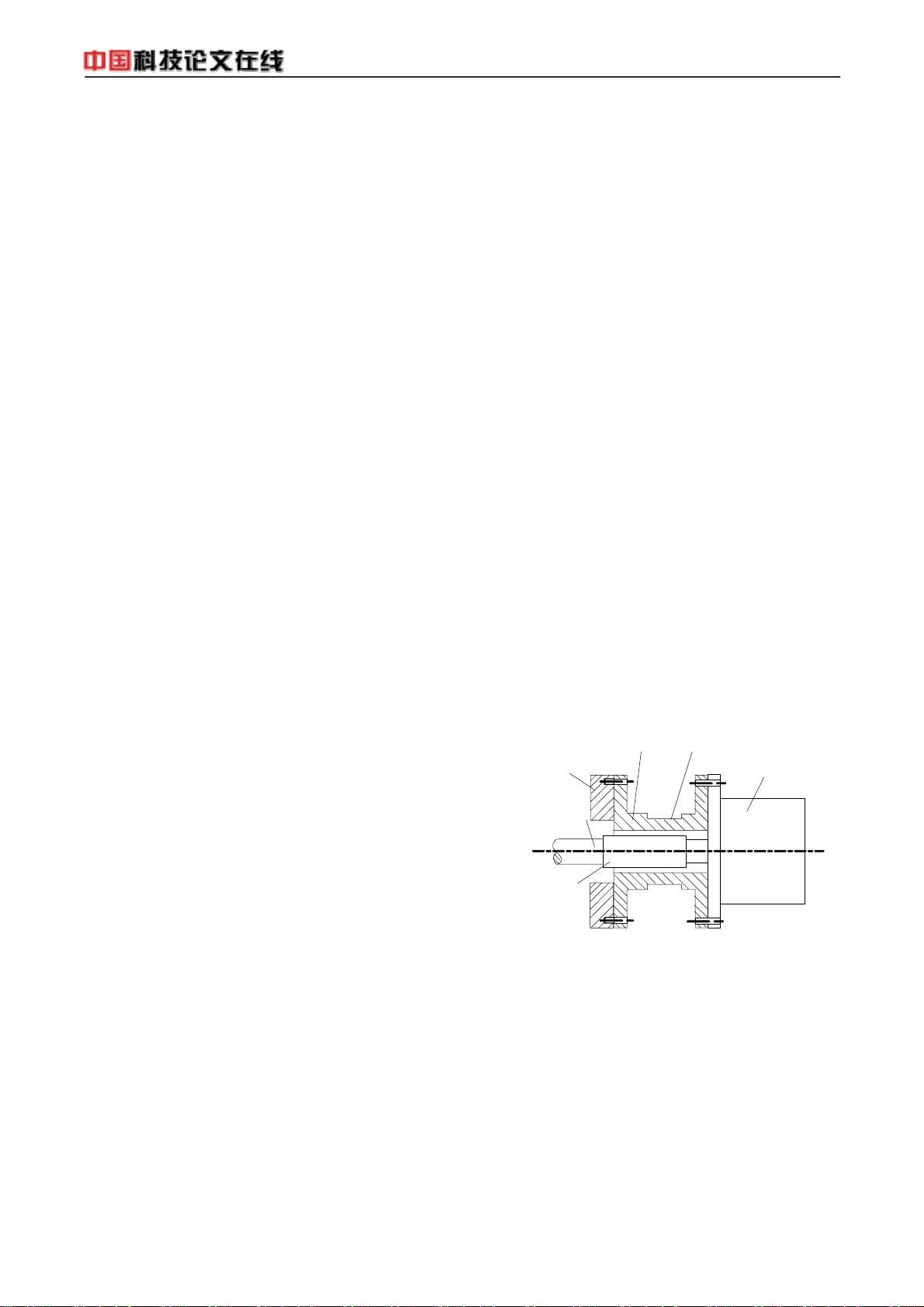
利用作用力与反作用力原理设计了一种新的应变式扭矩传感器,代替了传统试验中采用的碳刷—集流环式
扭矩传感器,间接测量了交流伺服电机的传递扭矩信号。对 XY 交流伺服工作台进行了动力学分析,建立了
动力学方程,获得了系统中的摩擦力矩数据。利用实验数据辨识了 Stribeck 摩擦模型的参数,得出了 XY
工作台的带参数摩擦模型。建立了 XY 交流伺服工作台的仿真模型,仿真结果表明本文中的实验方案设计是
可行的。
关键词
:摩擦;扭矩传感器;参数辨识
1. 引 言
摩擦现象不可避免地存在于相互接触的运动系统中。对于高精度机械加工系统,摩擦环节的存在可以
导致位置误差、极限环、爬行等现象的发生[1,2],极大地降低了系统的性能。尤其是精密加工、超精密加
工、纳米加工等技术,特别要求伺服系统具有极高的定位精度和低速性能。因此合理地解决机械系统中存
在的摩擦环节尤其是非线性摩擦环节的制约问题成为当前研究的热点问题。
XY 工作台是广泛地用于铣床等机械加工设备中的基本部件,其运动控制精度直接影响着工件的加工质
量。国内外许多研究者分别对由直流电机驱动的 XY 工作台中存在的摩擦现象进行了研究[3~6]。然而,随
着交流伺服控制技术快速的发展,高性能的交流伺服系统越来越多地取代直流伺服系统应用于数字控制系
统中,成为现代电伺服驱动系统的一个发展趋势[7]。因此有必要对由交流伺服电机驱动的 XY 工作台系统
中的摩擦问题进行研究。
由于系统中摩擦环节的存在,为了使 XY 工作台保持匀速运动,交流伺服电机的输出扭矩必然是实时变
化的。也就是说,电机的输出扭矩信号中必然包含了系统中的摩擦力信息。因此我们通过测量电机输出扭
矩来对工作台中的摩擦问题进行了研究。这种方法与过去研究由直流电机驱动的系统有很大的区别。例如,
Stephen 等人[8]通过直接控制直流电机的电流变化,研究了工业机器人中的摩擦建模和补偿。这是比较可
行的,因为对于直流伺服电机驱动系统而言,励磁磁场和电枢磁通势间的空间角度由电刷和机械换向器所
固定,电枢电流和电磁转矩间存在线性比例关系,因此可以通过调节电枢电流来对电动机输出转矩进行控
制。然而在交流伺服系统中,由于励磁磁场与电枢磁通势间的空间角度不是固定的,因此就不能简单的通
1
本课题得到教育部科学技术研究重点项目资助(104111)资助。
-2 -
剩余7页未读,继续阅读
资源评论













