

Coupling Semi-supervised Learning and
Example Selection for Online Object Tracking
Min Yang, Yuwei Wu, Mingtao Pei, Bo Ma and Yunde Jia
Beijing Laboratory of Intelligent Information Technology,
School of Computer Science, Beijing Institute of Technology, Beijing 100081, China
Abstract. Training example collection is of great importance for dis-
criminative trackers. Most existing algorithms use a sampling-and-labeling
strategy, and treat the training example collection as a task that is inde-
pendent of classifier learning. However, the examples collected directly
by sampling are not intended to be useful for classifier learning. Updat-
ing the classifier with these examples might introduce ambiguity to the
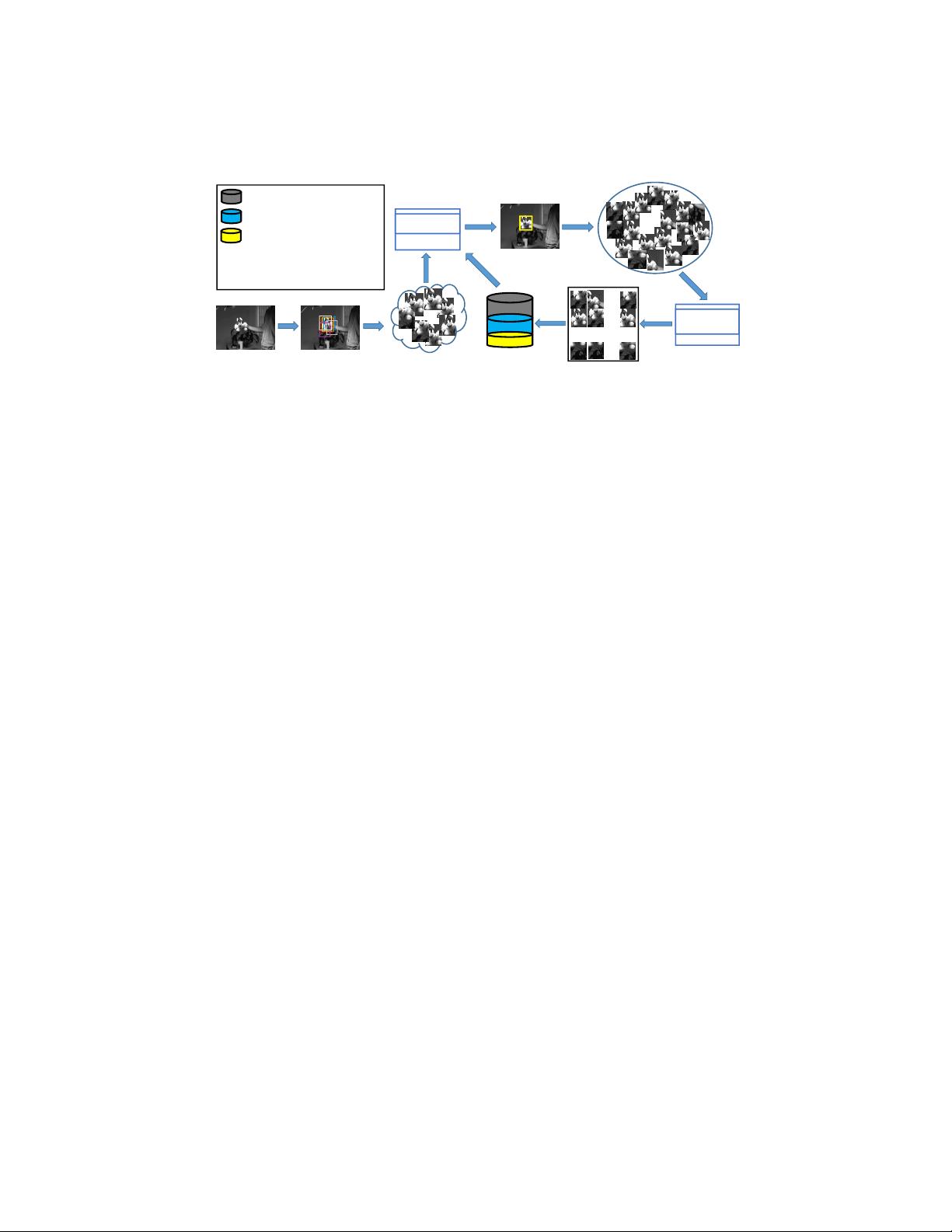
tracker. In this paper, we introduce an active example selection stage
between sampling and labeling, and propose a novel online object track-
ing algorithm which explicitly couples the objectives of semi-supervised
learning and example selection. Our method uses Laplacian Regularized
Least Squares (LapRLS) to learn a robust classifier that can sufficient-
ly exploit unlabeled data and preserve the local geometrical structure of
feature space. To ensure the high classification confidence of the classifier,
we propose an active example selection approach to automatically select
the most informative examples for LapRLS. Part of the selected exam-
ples that satisfy strict constraints are labeled to enhance the adaptivity
of our tracker, which actually provides robust supervisory information
to guide semi-supervised learning. With active example selection, we are
able to avoid the ambiguity introduced by an independent example col-
lection strategy, and to alleviate the drift problem caused by misaligned
examples. Comparison with the state-of-the-art trackers on the compre-
hensive benchmark demonstrates that our tracking algorithm is more
effective and accurate.
1 Introduction
Object tracking aims to estimate the trajectory of an object automatically in
a video sequence. Although the task is easily fulfilled by human vision system,
designing a robust online tracker remains a very challenging problem due to
significant appearance variations caused by factors such as object deformation,
illumination change, occlusion, and background clutters.
Numerous tracking algorithms have been proposed to address appearance
variations, and most of them fall into two categories: generative methods and
discriminative methods. Generative methods represent an object in a partic-
ular feature space, and then find the best candidate with maximal matching
score. Some popular generative trackers include incremental visual tracking [1],

剩余15页未读,继续阅读
资源评论













