
第
29
卷第
11
期
2012
年
11
月
控制理论与应用
Control
Theory
&
Applications
Vo
l. 29 No.
11
Nov.2012
文章编号:
1000-8152(2012)11
一
1433-07
旋转球与乒乓球台/球拍的反弹模型
任艳青
1
徐德
1
,
2
谭民
1
(1.中国科学院自动化研究所复杂系统管理与控制国家重点实验室,北京
100190;
2
中国科学院自动化研究所精密感知与控制研究中心,北京
100190)
摘要:本文在对乒乓球与球台/球拍反弹过程的受力、冲量、冲量矩分析的基础上,提出"临界摩擦角"的概念,
并利用
"11
备界摩擦角"给出乒乓球与球台/球拍之间是滚动还是滑动的判定条件,从而进一步得到乒乓球与球台/球
拍之间的物理反弹模型.另外,通过学习算法,利用多元线性回归得到了一种反弹模型.最后通过参数估计、试验验
证、误差分析,证明了两种反弹模型的有效性
关键词:乒乓球机器人;反弹模型;临界摩擦角;多元钱性回归;参数估计
中图分类号: TP273
文献标识码
:A
Rebound model between spinning table tennis ball and table/racket
REN
Yan-qing
l, XU
De
1
,2,
TAN
Min
1
(1. State
Key
Laboratory
of Management
and
Control
for
Complex
Systems
, Institute of Automation,
Chinese
Academy
of
Sciences
,
Beijing
100190
,
China;
2.
Research
Center of Precision
Sensing
and
Control
, Institute of
Automation
,
Chinese
Academy
of
Sciences
, Beijing
100190
,
China)
Abstract:
Based on the stress, impulse, and impulse moment
r
巳
ceiv
巳
d
by a spinning table tennis
ba
l1
from the ta-
ble/racket in the rebound process, a
conc
巳
pt
of
‘critical friction ang
1e'
is introduced and a
crit
巳
rion
is put forward to
distinguish the types
of
the friction effects, thus a physic
a1
rebound model is buil
t.
In addition, a linear rebound model is
obtained through the leaming algorithm and multiple linear
regr
巳
ssions.
Experiments and
th
巳巳
πor
analysis validate the
effectiveness
of
the two rebound models.
Key
words:
table tennis robot; rebound model; critical friction angle; multiple linear regressions;
p
缸缸
neter
estimation
1
引言
(Introduction)
因乒乓球的快速性和准确性均对打乒乓球机器
人提出了很高的要求,因此吸引了国内外很多研究
人员的关注.文献[1]从视觉系统、控制系统、执行结
构等方面对国内外乒乓球机器人的研究现状进行了
综述.
利用机器人打乒乓球,需要解决快速运动乒乓球
的跟踪、轨迹预测以及控制机器人击球等问题
[2]
也
就是说,对于机器人来讲,与人对打的任务可以划分
为以下几个子任务:
1)
通过视觉传感器(一般是高速
智能相机)获取乒乓球的飞行轨迹,然后进行图像处
理,测量乒乓球的位置、速度、角速度等飞行状态;
2)
利用测量得到的乒乓球的飞行状态和对乒乓球飞
行轨迹的分析,预测乒乓球下一阶段的飞行轨迹,即
位置、速度、角速度等状态;
3)
对机器人进行运动规
划,控制机器人在一定时间内,以一定的姿态在一定
的位置击打乒乓球,并达到一定的击球指标.
从打乒乓球机器人的控制过程可知,乒乓球与球
台/球拍的反弹模型对于准确预测乒乓球的飞行轨
收稿日期:
2012-03-20;
收修改稿日期
2012
一
05-10
基金项目-国家自然科学基金资助项目
(61075035
,
61273337).
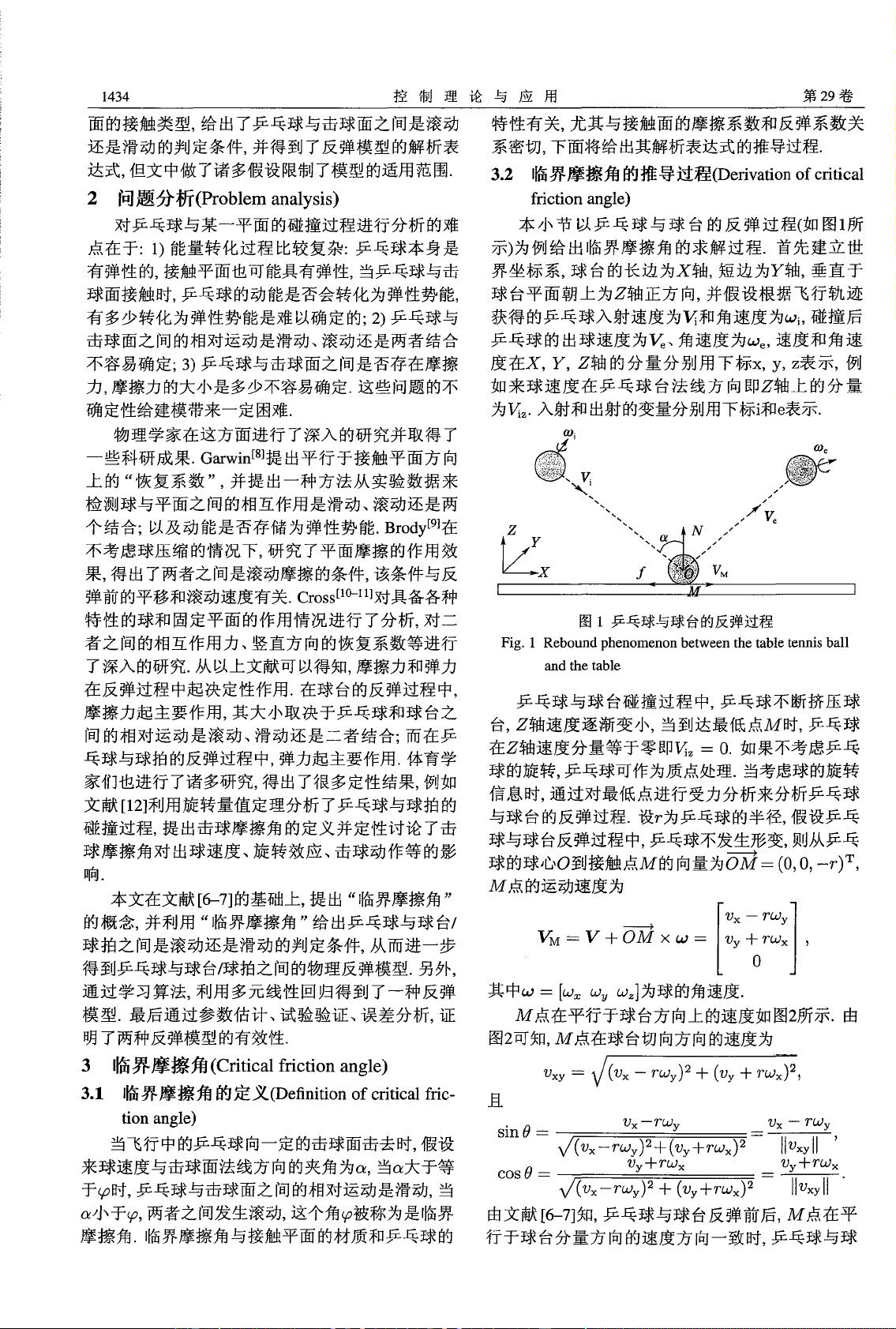
迹、规划机器人的运动控制方案均起着非常重要的
作用.乒乓球与球台/球拍碰撞后,乒乓球在摩擦力
的作用下产生一定的旋转量,因此反弹后的乒乓球
轨迹会在马格努斯力的影响下发生一定的偏转.因
此乒乓球与球台/球拍的反弹模型吸引了很多研究
人员的关注.
Zhang
等
[3]
假设平行于接触平面的两个
方向上的速度在碰撞前后成线性关系,在碰撞平面
的法线方向上,利用弹性恢复系数得到碰撞后的速
度.文献
[4]
中指出乒乓球在与桌面反弹的过程中会
有一定的能量损失,并将能量(速度)的损失用水平
方向上的速度损失率和竖直方向上的恢复系数来描
述.以上两种模型均未考虑乒乓球的旋转,限制了其
使用范围.
Andersson
在文献
[5]
中指出反弹结果是由
来球速度、角速度、乒乓球和球台的特性决定的,在
接触平面的法线方向上,反弹后的状态主要是由恢
复系数决定,在水平方向上,球的反弹速度是由球的
旋转速度、球台的摩擦系数、坚直方向的反弹参数
决定.但
Andersson
仅给出定性理论,未给出反弹模
型的解析表达式.文献
[6-7]
通过分析乒乓球与击球
剩余6页未读,继续阅读
资源评论


weixin_38710524
- 粉丝: 7
- 资源: 884









最新资源
- 基于Vue.js快速构建python桌面应用程序的模板项目源码+运行教程(支持打包为可执行文件).zip
- 防护具检测57-YOLO(v5至v9)、COCO、CreateML、Darknet、Paligemma、TFRecord、VOC数据集合集.rar
- 视频下载-b站视频下载器
- CSV数据操作的工具包-含合并CSV文件、Excel转CSV、CSV转XLSX、统计CSV行数、重命名表头、选择和重排CSV列等功能.zip
- App商店优化(ASO)权威指南:提高App可见度与转化率的技术策略
- TomVPN_3.0.7.apk
- AEC论文解读 - ACOUSTIC ECHO CANCELLATION WITH THE DUAL-SIGNAL TRANSFORMATION LSTM NETWORK
- Vegetation Studio 1.5.3
- 阀门检测49-YOLO(v5至v9)、COCO、CreateML、Darknet、Paligemma、TFRecord、VOC数据集合集.rar
- 非常好的SqlServer大量源代码和教程资料100%好用.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


