

第 33 卷 第 30 期 中 国 电 机 工 程 学 报 Vol.33 No.30 Oct.25, 2013
106 2013 年 10 月 25 日 Proceedings of the CSEE ©2013 Chin.Soc.for Elec.Eng.
文章编号:
0258-8013 (2013) 30-0106-07
中图分类号:
TM 351
文献标志码:
A
学科分类号:
470
⋅
40
重载条件下无刷直流电机无位置传感器驱动
换相续流影响的分析及其补偿
杨明,刘杰,徐殿国
(哈尔滨工业大学电气工程及自动化学院,黑龙江省 哈尔滨市 150001)
Analysis and Compensation of Commutated Current Freewheeling for
Sensorless Brushless DC Motor Under Heavy-load Condition
YANG Ming, LIU Jie, XU Dianguo
(Department of Electrical Engineering, Harbin Institute of Technology, Harbin 150001, Heilongjiang Province, China)
ABSTRACT: At the communication moment of brushless DC
motor (BLDCM), the terminal voltage is distorted by diode
freewheeling current from which phase current will be turn off.
Taking the back-EMF zero-cross detection method in
sensorless position control, this terminal voltage distortion can
make position detection signal phase ahead, deviating from the
best commutation time, especially, in heavy-load condition it
can cause commutation failure. Therefore back-EMF
zero-cross detection method has been restricted in light-power
application. The mechanism of freewheeling current causes
advance signal has been analyzed in this paper, and based
mathematical model, a position detection signal phase ahead
compensation method is presented too. Simulation and
experimental results show that the compensated signal is close
to the best commutation time, BLDC motor can still be normal
operation by sensorless control with heavy-load.
KEY WORDS: brushless DC motor (BLDCM); sensorless
control; freewheeling current; phase advance; heavy load
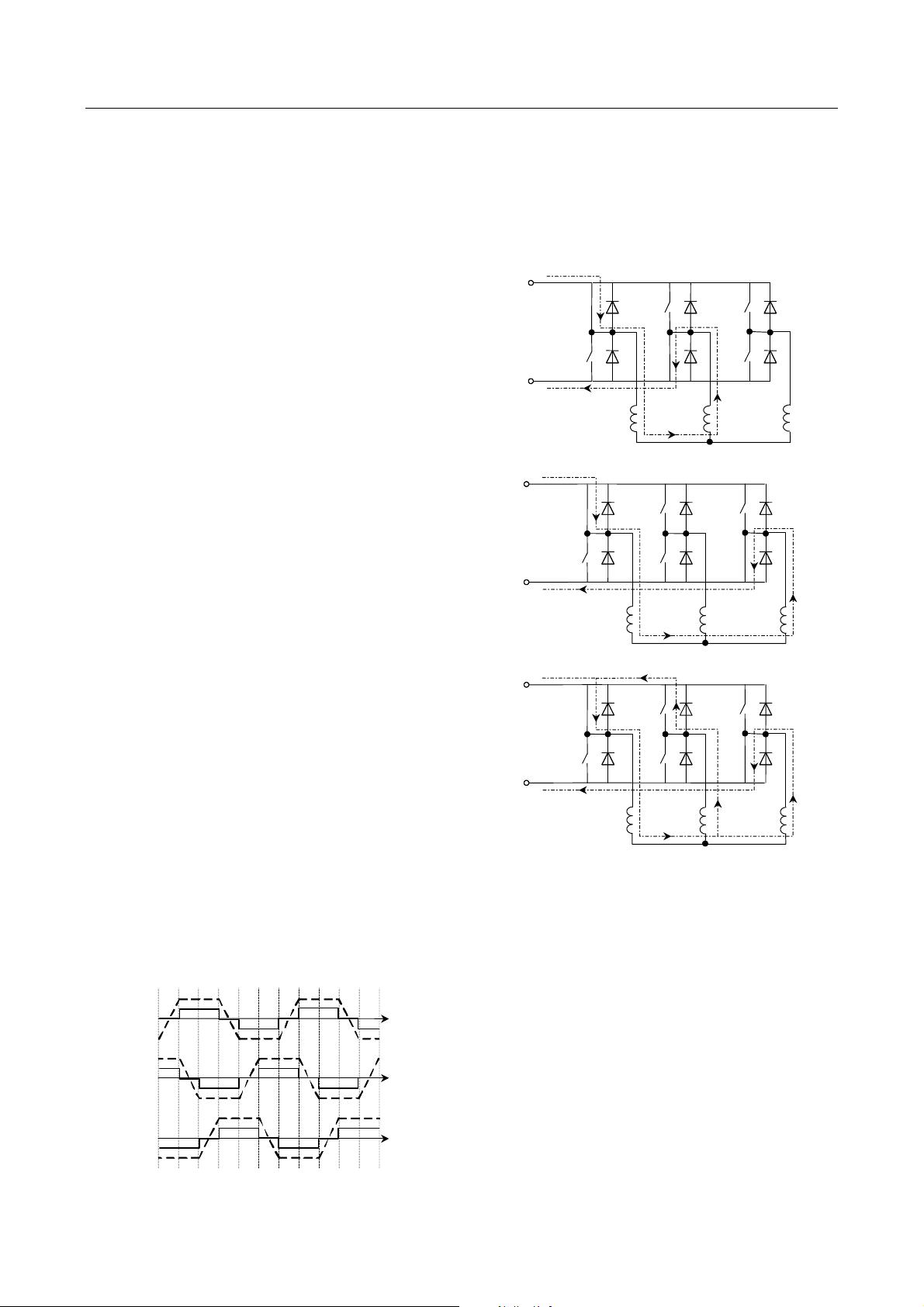
摘要:无刷直流电机(brushless DC motor,BLDCM)换相时
刻关断相电流的续流造成电机端电压的畸变。当采用无位置
传感器反电动势过零检测法时,端电压波形畸变会使位置检
测信号相位超前,偏离最佳换相时刻,重载条件下甚至会造
成换相失败,制约了反电动势检测法的电机功率应用范围。
因此,该文针对电流续流影响端电压的机理加以分析,建立
了电流续流产生相位超前的数学模型,并给出了位置检测信
号相位超前的补偿算法。仿真和实验结果表明,经过补偿后
的位置检测接近最佳换相时刻,重载条件下仍可正常运行。
关键词:无刷直流电机;无位置传感器控制;续流;相位超
前;重载
基金项目:国家自然科学基金项目(51007012)。
Project Supported by National Natural Science Foundation of China
(51007012).
0 引言
无位置传感器控制是无刷直流电机(brushless
DC motor,BLDCM)驱动技术的研究热点,其中基
于反电动势法的无位置传感器控制应用最为广
泛
[1-4]
。反电动势法中有三次谐波检测方法
[5-6]
和反
电动势检测方法
[7-10]
,它们都是对电机三相端电压
进行处理得到的反电动势的过零点,从而生成位置
检测信号。
反电动势法由于低通滤波器相移、位置信号计
算延时和电枢反应等因素造成位置信号检测误差,
会导致较大的电流峰值和转矩脉动,降低电机工作
效率,增加电磁噪声等。如果相位偏移得过大还可
能造成失步现象,影响电机正常运行。为此,很多
学者提出消除以上误差的方法。宋飞等通过检测非
导通相续流电流偏差,校正位置信号相位,但该方
法只适用于轻载的情况
[11]
。沈建新等采用一种数字
式校正电路补偿由于电枢反应造成的转子位置误
差
[12]
。文献[13]采用一种新的反电动势检测方式,
消除了检测滤波电路带来的相位误差,但是这种方
法对时序和控制器要求很高,且当重载续流超过
30°时不能检测到反电动势过零点。文献[14-16]提
出采用三次谐波和软件锁相环技术实现较宽速度
范围和负载条件的位置信号检测,但均无法对位置
信号检测精度进行判断。文献[17]分析了电枢反应
对位置检测的影响,并采用误差补偿电路校正位置
信号。文献[18-19]利用线电压之间的差值推导悬空
相的相反电动势,避免了中性点的检测或重构,但
该模型未考虑换相过程中二极管续流对端电压的
剩余6页未读,继续阅读
资源评论













