
第
23
卷第
3
期
石家庄铁道大学学报(自然科学版)
Vo
l.
23
No.3
2010
年
9
月
JOURNAL
OF
SHUIAZHUANG
TIEDAO
UNIVERSITY
(NATURAL
SCIENCE)
Se
p.
2010
一种基于摄像机标定的车辆视频测速方法
陈蓦东,马影,马增强
(石家庄铁道犬学电气与电子工程学院,河北石家庄
050043
)
摘要:以
Ts
国两步法为摄像机标定原理,提出了一种车辆速度视频测量方法,并对摄像机标
定误差和车速检测误差进行了分析。首先利用白白两步法得到摄像机的内部和外部参数,然后
将图像空间提取出的运动车辆特征点位移转换到世界坐标系,最后利用帧差时间求得车辆的瞬
时速度。实验结果表明,基于摄像机标定的丰辆速度视频测量方法,具有简单实用、鲁棒性强、
精确度高等优点,满足车辆视频测这革统的要求。
关键词
:Ts
国两步法;摄像机标定;车辆速度检测;误差分析
中图分类号
:T
P3
9
1.
4
文献标识码
:A
文章编号:
2095
-
0373
(2010)
03
∞
81
-05
车辆速度是智能交通系统中需要检测的最基本的参数之一。传统的车辆测速装置主要包括地感线
圈测速、雷达1JIJ1速、激光测速等,这些测速方式都存在各自不同的缺陷,最重要的是这些方法均不能为执
法部门提供直观的视频信息。而原有的基于视频图像的车辆测速方法,大都是根据图像信息按照一定的
比例,估计图像中的距离与真实世界坐标系中距离的映射关系
[1-3J
。这些方法存在较大的系统误差,更不
能满足系统鲁棒性要求。
以
Tsai
两步法为摄像机标定原理,提出了一
种车辆速度视频测量方法。
T.
白两步法标志精
度高、过程简单、鲁棒性强,满足实际测速系统的
要求。利用标定结果将车辆在连续两帧之间的
位移从图像坐标系转换到世界坐标系,再根据帧
差确定时间,从而求得车辆的瞬时速度。
1
摄像机标定
摄像机的成像过程可以通过一个数学模型
来大致的模拟,通过它可以获得被视
l
物体与图像
之间的儿何关系。本文采用的是
T
剧两步法
[4:
的摄像机标定方法。
1.1
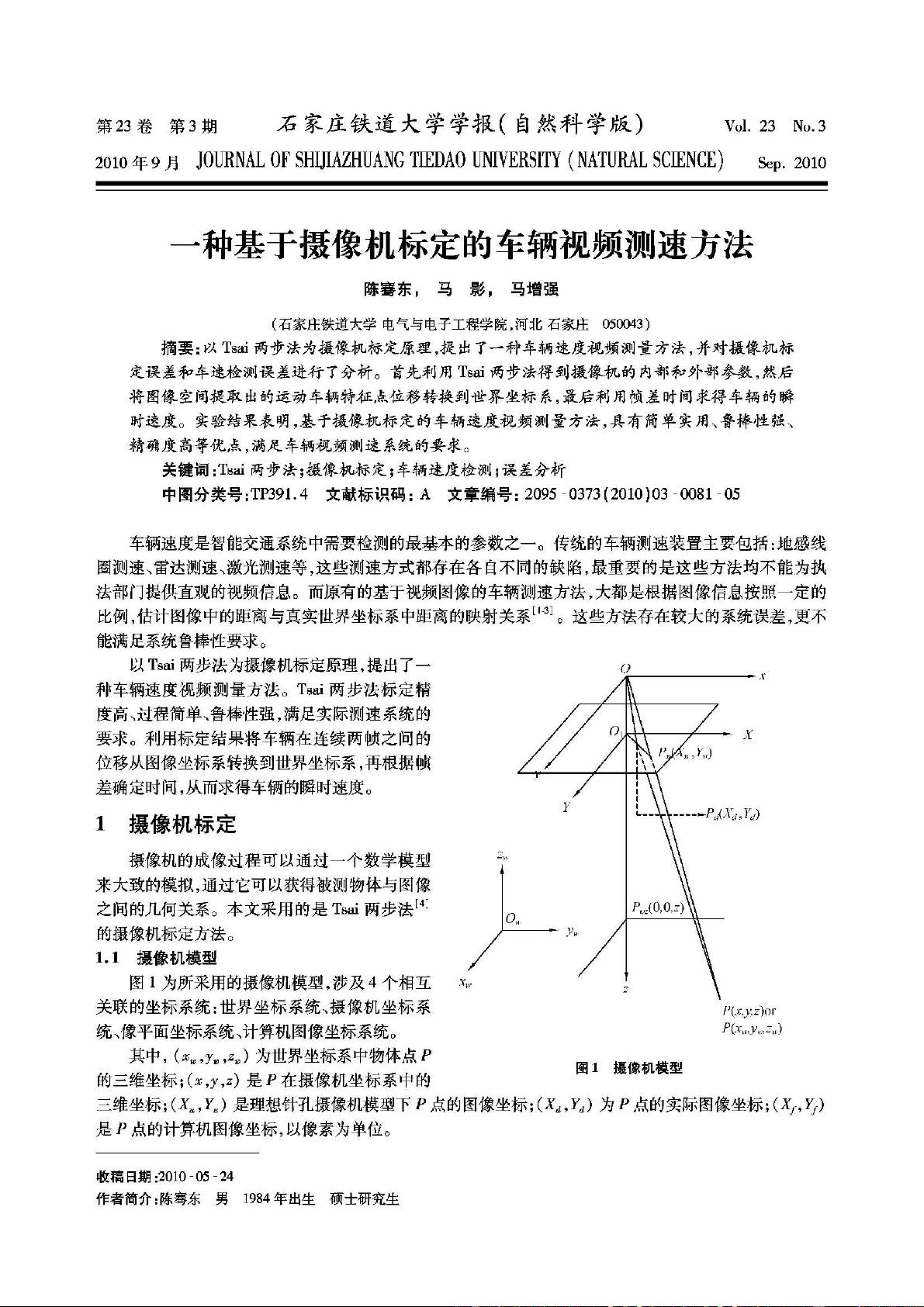
摄像机模型
图
1
为所采用的摄像机模型,涉及
4
个相互
凡
关联的坐标系统.世界坐标系统、摄像机坐标系
统、像平面坐标系统
其中
,
(x
w
'Y
1/l,
Z
1/l)
为世界坐标系中物体点
P
的三维坐标
;(x.y.z)
是
P
在摄像机坐标系中的
-协
()
1<
今
Y
c__
l.\.一
---PJ/\~
, 吨
Y
d
)
y"
圈
1
摄像机模型
P(x.v.z)or
P(X
,,,J\.,
z
,,,
)
三维坐标;
(孔
,
YJ
是理想针孔摄像机模型下
P
点的图像坐标;
(凡
,
Y
d
)
为
P
点的实际图像坐标;
(鸟,乌)
是
P
点的计算机图像坐标,以像素为单位。
收稿日期
:2
口
10
-0
击
24
作者简介:陈蓦东男
1984
年出生硕士研究生
资源评论


weixin_38709379
- 粉丝: 3
- 资源: 954









最新资源
- 英语四级考试综合训练与听力阅读翻译解析
- 三相异步电机转子磁场定向矢量控制技术及其与弱磁控制的协同优化策略,三相异步电机转子磁场定向矢量控制与弱磁控制策略探究,三相异步电机转子磁场定向矢量控制与弱磁控制 ,三相异步电机; 转子磁场定向矢量控制
- 【java毕业设计】SpringBoot+Vue自习室预约管理系统(高级版) 源码+sql脚本+论文 完整版
- 字节面试题,包括一面和二面,vue和react
- 技术博客基于MATLAB Simulink的移相变压器仿真模型,模拟实现可调移相角度的变压器副边36脉波不控整流,MATLAB Simulink仿真模型实现可设置移相角度的变压器副边36脉波不控整
- 利用Bigemap Pro缓冲区工具实现地图发光效果
- 2025 Data+AI:智能数据架构与应用最佳实践合集.pdf
- Vue生命周期详解:从初始化到销毁的关键环节与应用
- 2018 蓝桥杯C语言b组国赛真题
- 软件测试实验三1111111111111111
- 直接复制,然后粘贴到assert下面
- 基于Springboot敬老院管理系统源码+22张表+100%可以运行使用+三端19个菜单/业务功能+vue前后分离使用Maven、Spingboot等技术
- PEM电解槽仿真模型分析,基于Comsol仿真的质子交换膜电解槽多物理场耦合模型:传热、多孔介质流动与极化性能分析,质子交膜(PEM)电解槽comsol仿真模型,耦合电解槽,传热,多孔介质流动物理场
- 欧姆龙CP1H与三菱E700变频器通讯程序:实现三台变频器频率设定与读取,稳定可靠扩展功能强大,欧姆龙CP1H与三菱E700变频器通讯程序:实现三台变频器频率设定与读取,稳定可靠扩展应用,欧姆龙CP1
- COMSOL仿真研究:斜入射圆偏振高斯光与金纳米线在衬底上的相互作用-模型构建与应用,Comsol模拟研究斜入射圆偏振高斯光在金纳米线与衬底结构上的作用:应用其模型解析交互机制 ,comsol仿真斜
- 高等数学教育中几何画板课件制作的实例指导与微课教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


