
通信与网络中的超声波测距系统中单片机的应用通信与网络中的超声波测距系统中单片机的应用
引言 在自主行走机器人系统中,机器人要实现在未知和不确定环境下行走,必须实时采集环境信息,以实
现避障和导航,这必须依靠能实现感知环境信息的传感器系统来实现。视觉、红外、激光、超声波等传感器都
在行走机器人中得到广泛应用。由于超声波测距方法设备简单、价格便宜、体积小、设计简单、易于做到实时
控制,并且在测量距离、测量精度等方面能达到工业实用的要求,因此得到了广泛的应用。本文所介绍的机器
人采用三方超声波测距系统,该系统可为机器人识别其运动的前方、左方和右方环境而提供关于运动距离的信
息。 1 超声波测距原理 超声波发生器内部由两个压电片和一个共振板组成。当它的两极外加脉冲信
号,且其频率
引言引言
在自主行走机器人系统中,机器人要实现在未知和不确定环境下行走,必须实时采集环境信息,以实现避障和导航,这必
须依靠能实现感知环境信息的传感器系统来实现。视觉、红外、激光、超声波等传感器都在行走机器人中得到广泛应用。由于
超声波测距方法设备简单、价格便宜、体积小、设计简单、易于做到实时控制,并且在测量距离、测量精度等方面能达到工业
实用的要求,因此得到了广泛的应用。本文所介绍的机器人采用三方超声波测距系统,该系统可为机器人识别其运动的前方、
左方和右方环境而提供关于运动距离的信息。
1 超声波测距原理 超声波测距原理
超声波发生器内部由两个压电片和一个共振板组成。当它的两极外加脉冲信号,且其频率等于压电晶片的固有振荡频率
时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两极间未加外电压,当共振板接收到超声波时,
就成为超声波接收器。超声波测距一般有两种方法:①取输出脉冲的平均电压值,该电压与距离成正比,测量电压即可测量距
离;②测量输出脉冲的宽度,即发射超声波与接收超声波的时间间隔t,根据被测距离s=vt?2来得到测量距离,由于超声波速度v
与温度有关,所以如果温度变化比较大,应通过温度补偿的方法加以校正。
本测量系统采用第二种方法,由于测量精度要求不是特别高,所以可以认为温度基本不变。
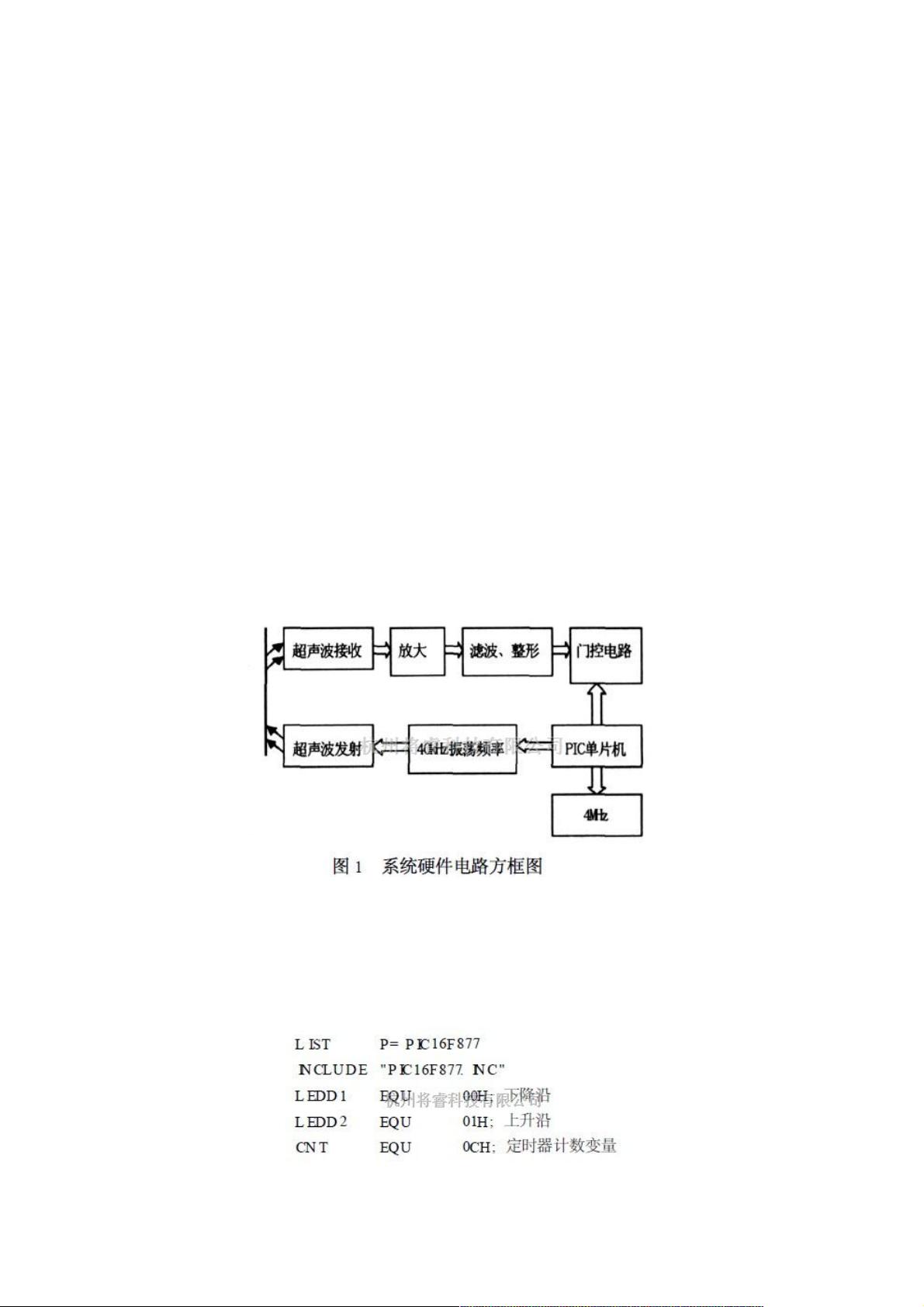
本系统以PIC16F877单片机为核心,通过软件编程实现其对外围电路的实时控制,并提供给外围电路所需的信号,包括
频率振动信号、数据处理信号等,从而简化了外围电路,且移植性好。系统硬件电路方框图见图1。
由于本系统只需要清楚机器人前方、左方、右方是否有障碍物,并不需要知道障碍物与机器人的具体距离,因此不需要显
示电路,只需要设定一距离阀值,使障碍物与机器人的距离达到某一值时,单片机控制机器人电机停转,这可通过软件编程实
现。
2 超声波发射电路 超声波发射电路
超声波的中心频率为40kHz,该频率可以通过以下程序产生(部分源程序):
资源评论













