

IEEE TRANSACTIONS ON FUZZY SYSTEMS, VOL. 22, NO. 5, OCTOBER 2014 1197
On the Monotonicity of Interval Type-2
Fuzzy Logic Systems
Chengdong Li, Member, IEEE, Jianqiang Yi, Senior Member, IEEE, and Guiqing Zhang
Abstract—Qualitative knowledge is very useful for system mod-
eling and control problems, especially when specific physical struc-
ture knowledge is unavailable and the number of training data
points is small.This paper studies the incorporation of one common
qualitative knowledge—monotonicity into interval type-2 (IT2)
fuzzy logic systems (FLSs). Sufficient conditions on the antecedent
and consequent parts of fuzzy rules are derived to guarantee the
monotonicity between inputs and outputs. We take into account five
type-reduction and defuzzification methods (the Karnik–Mendel
method, the Du–Ying method, the Begian–Melek–Mendel method,
the Wu–Tan method, and the Nie–Tan method). We show that IT2
FLSs are monotonic if the antecedent and consequents parts of
their fuzzy rules are arranged according to the proposed mono-
tonicity conditions. The derived monotonicity conditions are valid
for the IT2 FLSs using any kind of IT2 fuzzy sets (FSs) (e.g., Trape-
zoidal IT2 FSs and Gaussian IT2 FSs) and stand for type-1 FLSs
as well. Guidelines for applying the proposed conditions to model-
ing and control problems are also given. Our results will be useful
in the design of monotonic IT2 FLSs for engineering applications
when the monotonicity property is desired.
Index Terms—Data-driven method, fuzzy logic system, model-
ing and control, monotonicity, type-2 fuzzy, type-reduction and
defuzzification method.
I. INTRODUCTION
R
ECENTLY, type-2 (T2) fuzzy logic systems (FLSs)
[1]–[7] have attracted increasing interest, as T2 FLSs not
only have the advantages of conventional FLSs (type-1 FLSs)
but can provide the capability to model high levels of uncer-
tainties and produce more complex input–output mappings and
better results as well. To date, due to the computation com-
plexity and theoretical analysis difficulty, the most widely stud-
ied and applied T2 FLSs are the interval ones, where interval
type-2 (IT2) fuzzy sets (FSs)
1
[8]–[12] are adopted to reduce
Manuscript received February 4, 2013; revised May 12, 2013; July 14, 2013;
accepted September 17, 2013. Date of publication October 18, 2013; date of
current version October 2, 2014. This work was supported by the National Nat-
ural Science Foundation of China under Grant 61105077, Grant 61273149, and
grant 61074149, and the Excellent Young and Middle-Aged Scientist Award
Grant of Shandong Province of China (BS2012DX026).
C. Li and G. Zhang are with the School of Information and Electri-
cal Engineering, Shandong Jianzhu University, Jinan 250101, China (e-mail:
lichengdong@sdjzu.edu.cn; qqzhang@sdjzu.edu.cn).
J. Yi is with the Institute of Automation, Chinese Academy of Sciences, Bei-
jing 100190, China (e-mail: jianqiang.yi@ia.ac.cn).
Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TFUZZ.2013.2286416
1
IT2 FSs are isomorphic to interval-valued FSs [12]. Both concepts are alter-
natively used by different researchers; for example, in [13]–[17], interval-valued
FSs are utilized, while in most of the other references, IT2 FSs are adopted. As
an extension of T1 FSs, IT2 FSs (interval-valued FSs) have close relationships
with other extensions, e.g., intuitionistic FSs [18], interval-valued intuitionistic
computational complexity. IT2 FLSs have found lots of appli-
cations in many areas, especially in the modeling and control
fields [21]–[35].
For modeling, IT2 FLSs represent the input–output map-
pings of the systems to be identified and are usually constructed
through data-driven methods. When constructing IT2 FLSs us-
ing data-driven methods, we often encounter that the data points
are noisy and that the number of the data points is small. As
discussed in [36]: “in such cases, it is very important to fully
exploit the additional nonquantitative knowledge about the sys-
tem in order to obtain meaningful, interpretable models. More-
over, taking the qualitative knowledge about the system into
account renders the model-identification process less vulner-
able to noise and inconsistencies in the data and suppresses
overfitting.” Monotonicity between the inputs and outputs is
one of such qualitative knowledge in many modeling problems.
Taking the identification of the water heating system [37] for
example, the temperature of water will change with respect to
the heat power monotonically. Therefore, the identified fuzzy
model (type-2 or type-1) for the water heating system should be
monotonic between the heat power and the temperature.
For control applications, IT2 FLSs are utilized to realize con-
trol laws to reduce control errors. In many cases, the control
signal (output of IT2 FLS) should be monotonic with respect to
the error and/or the change of error (inputs of IT2 FLS). One
typical example is the control of a liquid level in a tank. An
appropriate fuzzy controller (type-2 or type-1) for this system
needs to open the valve larger as the liquid level deviates more
from the required level. Another example is the temperature
control of the refrigerator. The more the real temperature in the
refrigerator deviates from the setpoint, the lager the control ac-
tion is needed to be generated by IT2 FLS to increase the motor
speed in the compressor.
From the previous discussion, we can see that it would be very
helpful to find the conditions under which the FLSs can give
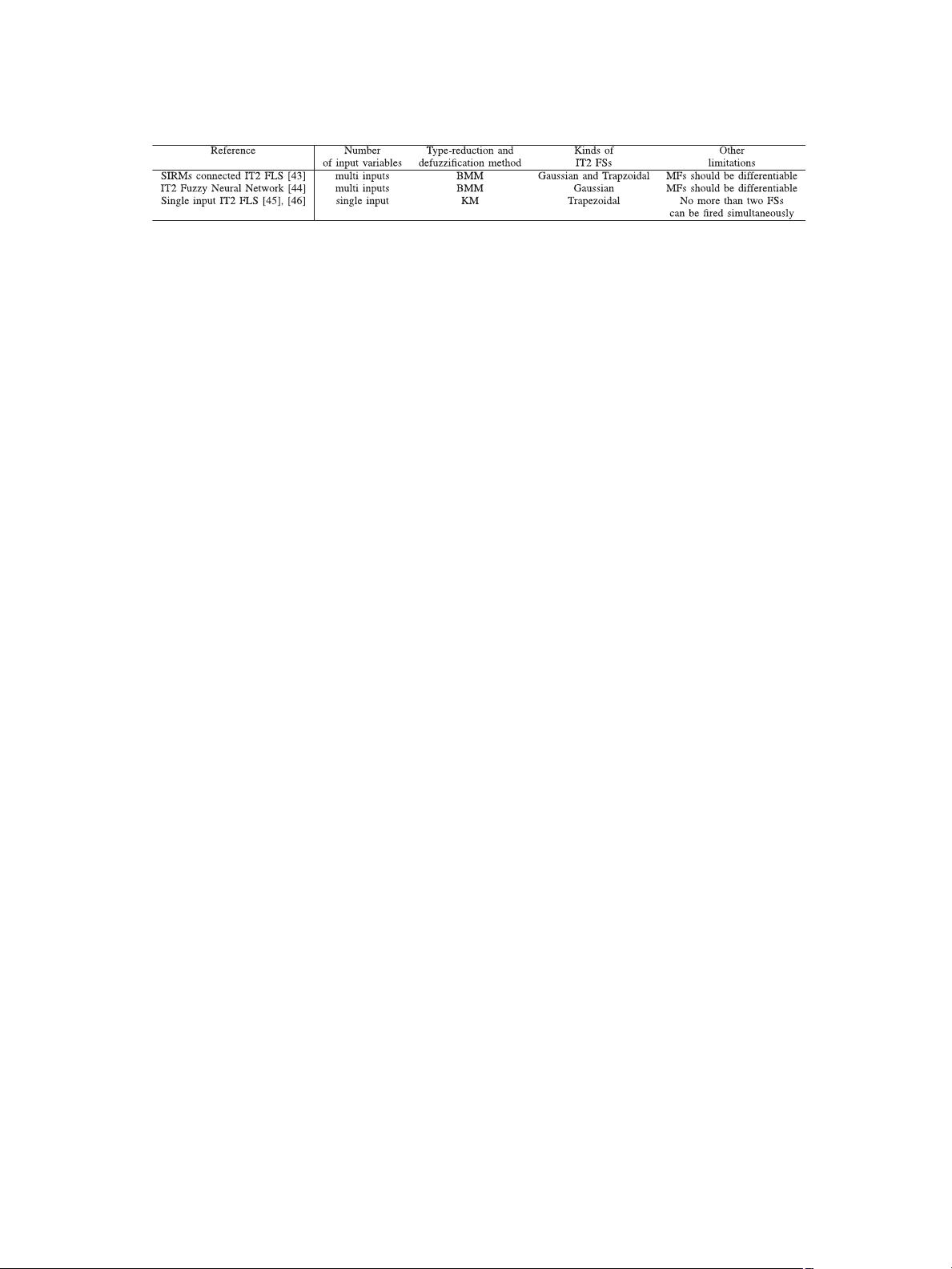
monotonic input–output mappings. There are several meaning-
ful papers on the monotonicity of type-1 (T1) FLSs [36]–[42].
Broekhoven et al. [36], [38] have studied the monotonicity is-
sue on the Mamdani–Assilian models under the mean of max-
ima defuzzification and the center-of-gravity defuzzification.
In [37], [39], and [40], sufficient parameter conditions are given
to ensure a monotonic input–output mapping of the TSK T1
FLS. Kouikoglou et al. [41] have discussed how to ensure the
monotonicity of the hierarchical sum-product T1 FLSs. Seki
et al. [42] have derived the monotonicity conditions of the sin-
gle input rule modules (SIRMs) connected T1 FLSs.
FSs [18], and L-FSs [19]. Deschrijver and Kerre [20] have made a comprehen-
sive study on the relationships among such popular extensions of T1 FSs.
1063-6706 © 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications
standards/publications/rights/index.html for more information.
剩余15页未读,继续阅读
资源评论


weixin_38699302
- 粉丝: 2
- 资源: 923









最新资源
- 点云数据处理与开发基础教程
- (源码)基于 JavaWeb 的超市收银系统.zip
- (源码)基于Vue和Cordova的移动端在线选座购票系统.zip
- (源码)基于C++的simpleDB数据库管理系统.zip
- (源码)基于Arduino的RTOSMMESGU实时操作系统项目.zip
- (源码)基于STM32和TensorFlow Lite框架的微语音识别系统.zip
- (源码)基于C#的支付系统集成SDK.zip
- (源码)基于Spring Cloud和Spring Boot的微服务架构管理系统.zip
- (源码)基于物联网的自动化开门控制系统 iotsaDoorOpener.zip
- (源码)基于ROS的Buddy Robot舞蹈控制系统.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


