
基于图像显著区域检测的基于图像显著区域检测的SIFT特征匹配方法研究特征匹配方法研究
针对目标检测中利用SIFT算法在提取图像特征时提取的背景特征点所占比例较大,提出了一种图像显著区域与
SIFT算法相结合的目标匹配方法。为使检测出的极值点与人眼观察到的极值点相似,提出对尺度空间中的图像
进行显著区域的检测;为了使特征点具有仿射不变性,对特征点进行椭圆拟合;特征匹配时引入夹角余弦相似
度测度方法。实验表明,该算法在实时性
摘摘 要要: 针对
关键词关键词: 尺度空间;
0 引言引言
随着计算机科学技术的快速发展,特征匹配得到了广泛的应用。SIFT(尺度不变特征变换)算法是由LOWE D G提出的
一种基于局部特征的描述方法[1],许多研究者实验表明SIFT算法存在着128维的特征描述符计算复杂度较高、时间过长、误匹
配较多的问题。
为了减少特征点提取的个数以及使得提取出的特征点与人眼观察到的特征点相近,本文提出了一种基于视觉显著图[2]的
SIFT算法。本文主要是利用显著区域检测的方法来得到特征点;再利用SIFT方法对其进行描述;最后,利用欧氏距离与夹角
余弦相结合的相似性测度方法进行特征匹配。实验结果表明,本文算法在计算复杂度方面比传统算法有较大的提高。
1 SIFT算法算法
SIFT是一种检测图像局部特性的算法,该算法主要包括以下四个步骤[3]:
(1)尺度空间极值点检测
首先构建尺度空间:
关键点的初步探索是利用差分高斯差分金子塔内同一组相邻两层图像之间比较完成的。其中高斯差分金字塔为:
(2)关键点的准确定位
接下来就是要确定关键点的位置、尺度以及主曲率的比值,SIFT算法使用拟合三维二次函数来确定关键点。
(3)关键点方向分配
对于在DOG金字塔中检测出的关键点,采集其所在高斯金字塔3?滓邻域窗口内像素的梯度和方向分布特征。梯度的模值
m(x,y)为:
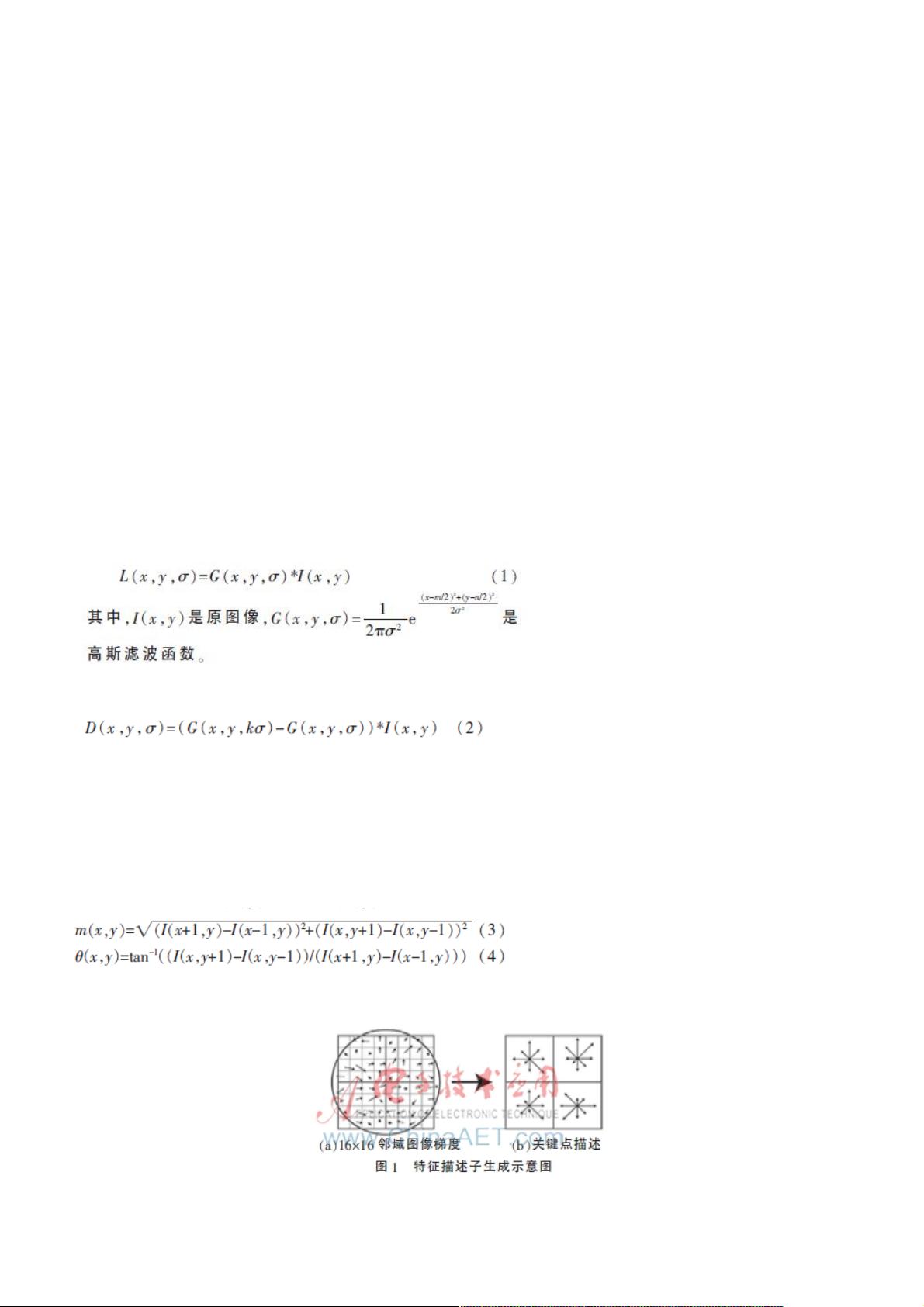
(4)局部图像描述符
描述符的产生如图1所示。首先取以关键点为中心的16×16像素大小的邻域,然后从16×16的区域中计算4×4的描述符序
列。在关键点周围4×4的邻域内计算8个方向的描述序列,至此就产生了128维的特征描述向量。最后对特征向量归一化以消除
光照影响。
资源评论


weixin_38696176
- 粉丝: 6
- 资源: 919









最新资源
- 基于WeChaty与多AI服务的微信机器人设计源码
- vic水文模型 VIC水文模型 全程视频教学指导,讲解详细,从基础内容处理讲解到模型参数率定全程教学 零基础可学 自用模型,从零到实践,历时两周左右
- PCB表面缺陷检测数据集 含有xml标签文件 可用于yolov3 yolov4 yolov5 yolov6 yolov7 yolov8目标检测
- 基于家庭陪伴式教育的0-12岁儿童游泳俱乐部网站设计源码
- 基于Java Web技术的电商购物系统设计与实现-涵盖前后端技术及安全高效的在线购物解决方案
- C#编写CIP通讯源码,欧姆龙NX1P通讯DEMO
- 基于Vue3、TypeScript、Vite、Pinia、Vue Router、Axios、Element Plus和Mock的现代化前端设计源码
- MATLAB代码:基于纳什谈判理论的风–光–氢多主体能源系统合作运行方法 关键词:合作博弈 纳什谈判 风–光–氢系统 综合能源 参考文档:《基于纳什谈判理论的风–光–氢多主体能源系统合作运行方法》
- apache-tomcat-9.0.88.7z
- nvm-setup.zip安装包
- 基于matlab的指纹图像预处理系统代码
- apache-maven-3.6.3-bin.rar
- comsol18650.21700锂电池热失控仿真,26650.温度和电压等结果
- 配网两阶段鲁棒优化调度模型 关键词:两阶段鲁棒优化,CCG算法,储能 仿真算例采用33节点,采用matlab+yalmip+cplex编写,两阶段模型采用CCG算法求解 模型中一阶段变量主要包括01
- node-modules 前端依赖比较完整的依赖 node需要14的
- 纯汽蒸汽发生器程pro序 组态系统 PID程序,液位控制,阀门控制,趋势图 硬件:1200触摸屏和西门子1500,源程序 适合过程控制学习,博图入门学习~
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


