基于FPGA的恒温晶振频率校准系统的设计
124 浏览量
2020-10-25
23:42:06
上传
评论 1
收藏 293KB PDF 举报

基于基于FPGA的恒温晶振频率校准系统的设计的恒温晶振频率校准系统的设计
为满足三维大地电磁勘探技术对多个采集站的同步需求,基于FPGA设计了一种晶振频率校准系统。系统可以调
节各采集站的恒温压控晶体振荡器同步于GPS,从而使晶振能够输出高准确度和稳定度的同步信号。系统中使
用FPGA设计了高分辨率的时间间隔测量单元,达到0.121 ns的测量分辨率,能对晶振分频信号与GPS秒脉冲信
号的时间间隔进行高精度测量,缩短了频率校准时间。同时在FPGA内部使用PicoBlaze嵌入式软核处理器监控
系统状态,并配合滑动平均滤波法对测量得到的时间间隔数据实时处理,有效地抑制了GPS秒脉冲波动对频率
校准的影响。
三维大地电磁勘探技术是以面元为单位,多分量采集站为中心,多远参考、互参考和密集布点为特征来获得高质量的采集
数据[1]。野外施工时,为了保持站点间同步地进行数据采集,一般采用
为解决以上问题,本文将GPS授时信号用于校准各站点的压控晶振,之后再使用晶振分频得到定时信号来同步各采集站
点。这样不仅克服了GPS授时信号易受外界干扰的缺点,也解决了晶振频率随时间漂移的问题,能获得较为理想的同步信
号。为了使本地晶振长时间地同步于GPS系统,就需要不断测量GPS授时信号与本地晶振的分频信号的时间间隔[2],再根据
测量数据来校准和同步本地晶振。因此,
1 系统设计系统设计
1.1 系统实现方案系统实现方案
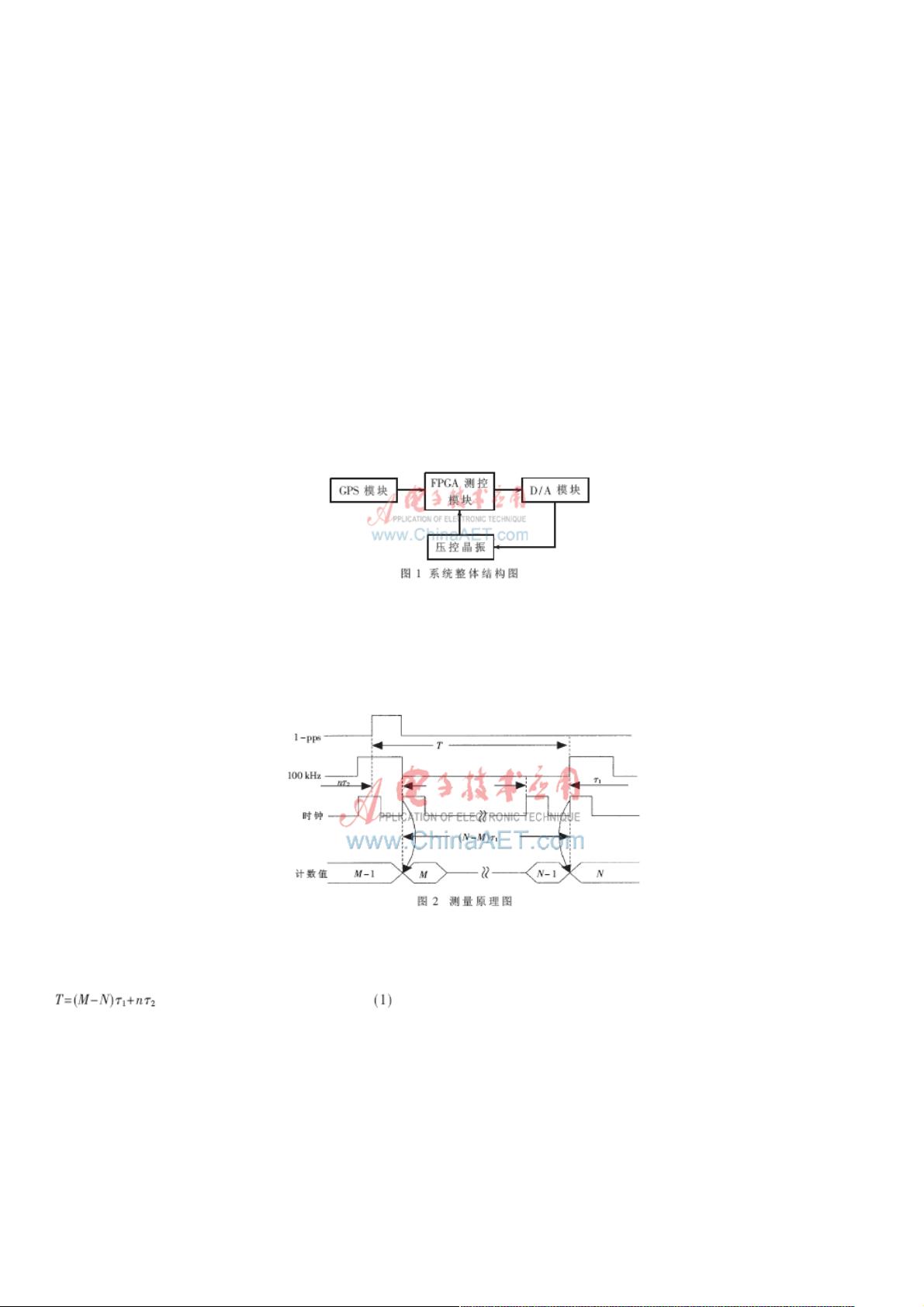
系统的原理如图1所示,主要由GPS接收模块、FPGA测控模块、D/A转换模块和压控恒温晶振4部分组成。GPS接收模块用
于输出标准的1-pps脉冲信号,FPGA测控模块用于测量本地晶振分频信号与1-pps信号的时间间隔,并将所测值在PicoBlaze
中进行处理得到晶振输出频率相对于GPS系统的频率偏差,最后将结果作为D/A转换模块的输入得到修正本地晶振频率的控制
电压。
1.2 测量原理测量原理
时间间隔在FPGA中的测量的原理如图2所示,使用1-pps秒脉冲信号与本地晶振分频得到的100 kHz信号进行比对,得到的时
差即是待测的时间间隔。由于只采样两者的上升沿间的时间间隔,所以用100 kHz分频信号代替1 Hz秒信号与1-pps比对,可
以减小每次的测量值,方便数据处理。需要注意的是晶振相对于1-pps的时差范围必须在100 kHz信号的一个周期内,即该信
号的频率决定了测量量程的大小,可以根据实际测量需要来决定该信号的频率。
图2中T是待测的时间间隔,τ
1
是计数时钟周期,M是计数器在1-pps信号到来时的计数值,N是计数器在100 Hz信号到
来时的计数值,nτ
2
是由于1-pps脉冲上升沿和计数时钟上升沿不一致所引起的测量误差,这部分误差由内插延迟线来测
量。由于100 kHz信号由晶振分频得到,它和计数时钟同步,所以不会产生测量误差。因此,待测的时间间隔可以表示为:
1.3 延迟线模块的设计延迟线模块的设计
为了在短时间内校准本地晶体振荡器,使之与GPS系统同步,必须提高时间间隔的测量分辨率,在设计中使用了时间内插
技术。其基本原理是利用多个延时单元构造延迟线,待测信号在延迟线中的传播信息便可以用来进行时间间隔测量[3]。延迟
线的实现主要依赖于内插延迟单元延时的均匀性,内插延迟单元的单位延时决定了时间间隔测量系统的分辨率。在FPGA中实
现时间内插,关键是在其结构的基础上利用内部已有资源构造出延迟线[4-6]。
在XILINX公司FPGA的单元结构中,为了实现快速的数学运算设置了许多专用的进位逻辑资源。这些进位逻辑的延时很
小,而且它们之间可以相互连接组成进位线,可以使用这种专用的进位线作为延迟线来实现时间内插[7]。如图3所示,设计中
使用了Spartan-3系列的FPGA中专用的进位逻辑逐个连接组成延迟线,一个进位逻辑由查找表(LUT)、专用选通器
(MUXCY)和专用异或门(XORCY)三部分构成。其总体结构上类似一个多位二进制加法器,两个输入的各位分别被置为1和
0,进位信号没来时加法器各位均为1。当进位信号到来时就会沿着进位线一级一级地传输,加法器每一位输出值的变化就代
表着信号的延迟信息,时钟前沿到达时就可以将这些信息锁存入触发器中。图4是在一个时钟周期的仿真中延迟线单元输出经
过的延迟单元的个数,进行直线拟合后的结果为:






评论0
最新资源