

第
卷
第
期
激 光 与 光 电 子 学 进 展
年
月
Laser&O
p
toelectronicsPro
g
ress
Ma
y
基于双目视觉与特征匹配跟踪的薄壁件振动测量
伍 济 钢
,
邵 俊
,
周 根
,
阳 德 强
,
成 远
湖南科技大学机械设备健康维护湖南省重点实验室
湖南 湘潭
摘要
针对薄壁件振动测量的需求
将双目视觉与特征 匹配 跟 踪结 合
提 出了 一种 较 为准 确的 薄 壁件 振动 测 量方
法
先利用双目相机连续采集薄壁件的振动图像
并进 行滤 波 和二 值化 等 图像 预处 理 操作
再 选取 左右 相 机拍 摄
的第一帧图像
根据极线约束原理对图像上的特征点进 行立 体 匹配
利 用改 进后 的 光流 法对 第 一帧 图像 上 的特 征
点进行跟踪
从而获得第二帧到最后一帧图像上特征点 准确 的 像素 坐标
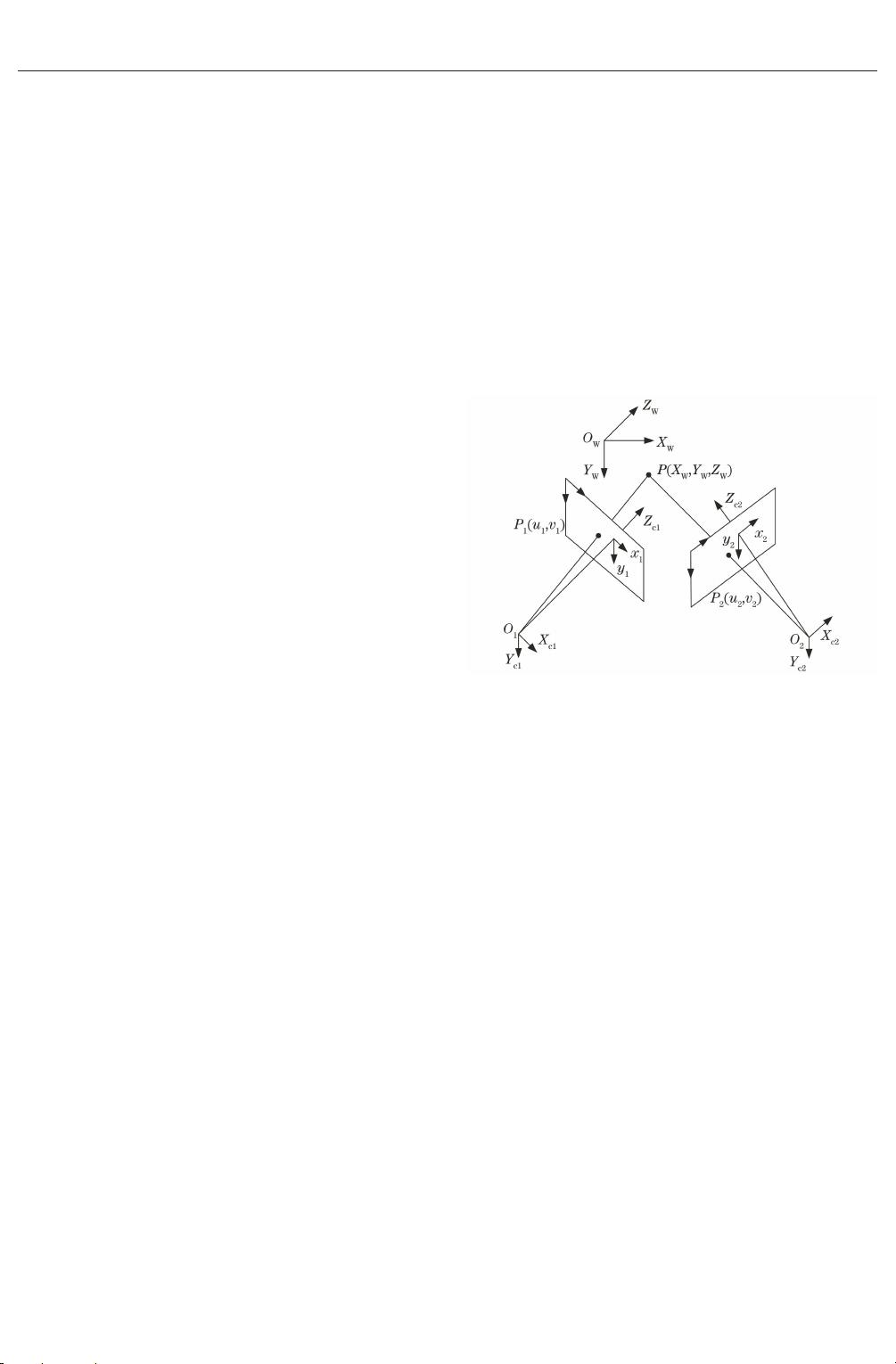
最 后根 据双 目 视觉 测量 原 理获 得物 体 的
三维振动位移信息
实验研究和分析结果表明
该方法 能够 准 确测 量薄 壁 件的 振动 位 移信 息
为 进一 步开 展 振动
特性分析
减振优化设计和结构损伤识别等研究提供一种新的技术参考
关键词
成像系统
薄壁件
双目视觉
振动测量
特征匹配跟踪
光流法
中图分类号
文献标志码
doi
:
.
/
LOP.
Vibration MeasurementofThinGwalledPartsBasedon
BinocularVisionand Matchin
g
andTrackin
g
ofFeatures
WuJi
g
an
g
ShaoJun ZhouGen Yan
g
De
q
ian
g
Chen
g
Yuan
HunanProvincialKe
y
Laborator
y
o
f
MechanicalE
q
ui
p
mentHealth Maintenance
HunanUniversit
y
o
f
ScienceandTechnolo
gy
Xian
g
tan
Hunan
China
Abstract
Ke
y
words
OCIScodes
收稿日期
修回日期
录用日期
基金项目
国家自然科学基金
湖南省研究生科研创新项目
EGmail
引
言
薄壁 件具有结构 紧凑和质量 轻等优点
已广泛
应用于汽车和航空 航 天等诸多 工 程领域
同 时
薄壁件还具有刚度 低和强度 弱 等特点
这使得设 备
在运行过程中极易 受外界环 境 影响而产 生 振动
长
久便会造成薄壁件 疲 劳损伤甚 至 发生断裂
这将
会给设备的安全运 行带来极 大 的安全隐 患
因此需
剩余6页未读,继续阅读
资源评论


weixin_38689027
- 粉丝: 5
- 资源: 888









最新资源
- 基于Zigbee的智能农业大棚环境检测全部资料+详细文档+源码+优秀项目.zip
- 机械设计三轴模组称重扫码机 sw18可编辑全套设计资料100%好用.zip
- 基于spark的表格实体扩展全部资料+详细文档.zip
- 基于Spark MLlib平台,通过协同过滤算法实现电影推荐功能全部资料+详细文档.zip
- 基于 spark 的 机器 学习 算法全部资料+详细文档.zip
- 基于Spark的电影推荐,ALS交替最小二乘法,基于矩阵分解的协同过滤推荐。全部资料+详细文档.zip
- 基于spark的统一离线ETL框架全部资料+详细文档.zip
- 基于Spark的电商系统全部资料+详细文档.zip
- 基于Spark的交通研判系统全部资料+详细文档.zip
- 基于spark的日志分析工具全部资料+详细文档.zip
- 基于离线模式下数据的spark大数据的处理全部资料+详细文档.zip
- 基于Spark框架的改进并行化综合能源客户识别全部资料+详细文档.zip
- 基于Spark的图书推荐算法全部资料+详细文档.zip
- 机械设计丝杆阀体双工位装配机sw18可编辑全套设计资料100%好用.zip
- 机械设计水下机械人 sw18可编辑全套设计资料100%好用.zip
- python入门-16.学生分组-大佬带队就可以人少啦.py
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


