
采用采用Cortex-M3单片机设计的单片机设计的WiFi物联网小车物联网小车
WiFi物联网小车设计方案,采用电脑上位机软件通过无线WiFi 控制小车的运动,采集小车的信息。与传统的“智
能小车”相比,主要特点在于使用32 位高性能单片机控制、互联网通信机制和电脑上位机软件控制。此方案融合
了电脑软件、网络通信、图像处理、图形显示、运动控制、速度采集和温度采集等技术,具有“物联网”的相关特
点。传统的小车控制大多使用红外通信,使用遥控器进行控制,不但受到距离的限制,而且远没有电脑软件直
观美观。互联网通信使小车具备远程控制的能力,这是红外通信望尘莫及的。此外,本方案小车控制芯片采用
Cortex-M3单片机,该单片机具有极丰富的外设,这给小车以后功能升级和扩展奠定了基础。
WiFi物联网小车设计方案,采用电脑上位机软件通过无线WiFi 控制小车的运动,采集小车的信息。与传统的“智能小车”相
比,主要特点在于使用32 位高性能单片机控制、互联网通信机制和电脑上位机软件控制。此方案融合了电脑软件、网络通
信、图像处理、图形显示、运动控制、速度采集和温度采集等技术,具有“物联网”的相关特点。传统的小车控制大多使用红外
通信,使用遥控器进行控制,不但受到距离的限制,而且远没有电脑软件直观美观。互联网通信使小车具备远程控制的能力,
这是红外通信望尘莫及的。此外,本方案小车控制芯片采用Cortex-M3单片机,该单片机具有极丰富的外设,这给小车以后功
能升级和扩展奠定了基础。
1 总体设计方案总体设计方案
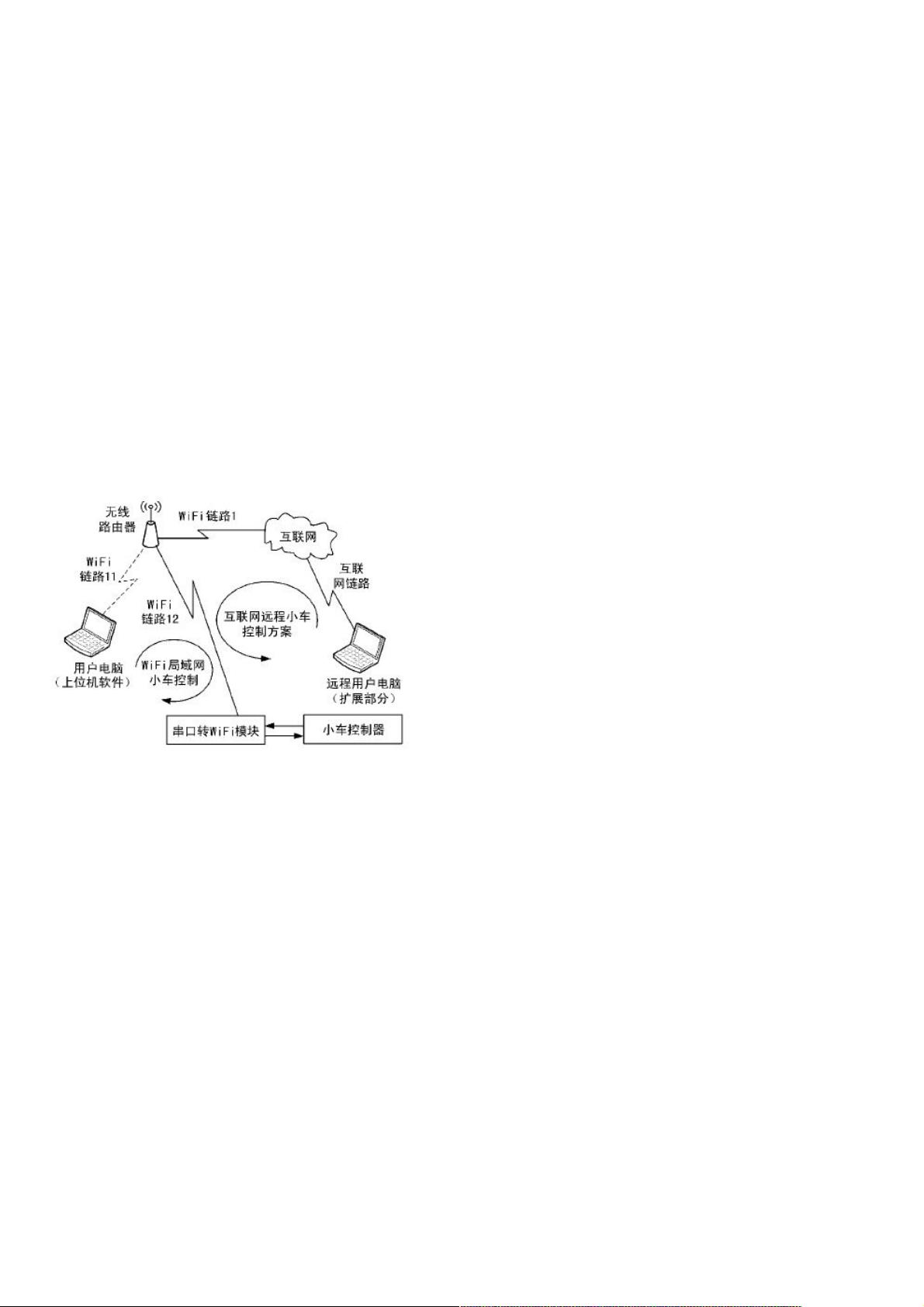
WiFi 物联网小车设计方案需要达到的目的是使用电脑软件(简称上位机)通过互联网与小车控制端(简称下位机) 进行
通信,从而控制小车的运动,采集小车的速度、温度以及视频监控等功能。总体设计方案如图1 所示。图中有2 种通信模式可
选,其中“WiFi 局域网小车控制”是采用局域网的方式,将上位机、无线路由器和小车组成一个局域网,实现上位机控制小车的
目的。“互联网远程小车控制方案”是采用远程互联网的方式,将上位机与小车组成一个互联网,从而实现远程控制小车的目
的。2 种方案的技术类似,由于受到实验条件的限制,本设计以局域网小车控制为例进行讲解说明。
图1 总体方案设计
从通信的角度来讲,无线路由器是上位机和下位机的数据中心,上位机通过Winsocket 套接字编程创建一个网络接口与路
由器进行连接,小车端通过一个串口转WiFi 模块,将串口数据通过WiFi 模块转换成WiFi 信号与路由器交互。此过程中,上位
机和下位机WiFi 模块均有一个独立的局域网IP 地址。通过这个IP 地址上位机和下位机便可以实现网络通信。
从控制的角度来讲,上位机是小车的控制中心,上位机通过“按键”发出指令给小车,小车收到指令后回传相关数据给上位
机,上位机收到小车回传的数据,经过解析,将其显示出来。
1.1 上位机软件设计
上位机主要功能是控制小车运动,显示小车的速度、周围的温度以及小车采集的摄像。如图2 所示,这些功能由2 个线程
来完成分别是“图像、声音处理线程”和“小车运动控制,速度、温度采集线程”等。前一个线程主要负责接收并处理有小车WiFi
摄像头传过来的图像信息和音频信息,此部分主要涉及到DirectShow 相关技术。后一个线程主要负责小车运动的控制,包
括“前进、后退、左转、右转、停止、加速、减速、转向灯和喇叭”以及接收处理小车回传的温度和速度信息等,并用虚拟图表
显示出来。上位机软件2 个线程都创建了一个互不相干的套接字,前者用于与小车WiFi 摄像头进行数据交互,后者用于与小
车串口转WiFi 模块进行数据交互。
资源评论


weixin_38688890
- 粉丝: 6
- 资源: 964









最新资源
- YoloX目标检测算法的结构原理及其应用优化
- java-leetcode题解之Populating Next Right Pointers in Each Node.java
- java-leetcode题解之Plus One.java
- java-leetcode题解之Play with Chips.java
- java-leetcode题解之PIO.java
- java-leetcode题解之Permutation Sequence.java
- java-leetcode题解之Permutation in String.java
- java-leetcode题解之Perfect Squares.java
- java-leetcode题解之Path with Maximum Gold.java
- java-leetcode题解之Path Sum III.java
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


