
第
37
卷第
5
期
2011
年
5
月
北京工业大学学报
JOURNAL
OF
BEIJING UNIVER51TY OF TECHNOLOGY
Vo
1.
37 No.5
May
2011
双目移动机器人立体匹配算法
王贵财崔平远
1
,
2
居鹤华
1
(1.北京工业大学电子信息与控制工程学院,北京
100124 ;
2.
北京理工大学宇航学院,北京
100081 )
摘
要:提出一种基于图像分割和可信点的双目移动机器人立体匹配算法,首先采用纹理检验分割算法对双目
移动机器人获得的左右图像进行分割,确定低纹理和纹理相似区域;然后通过
51
町特征匹配点得到可信点视
差;其次采用
5AD
区域匹配加速算法得到初始视差;最后依据
51FT
特征匹配点的分布、初始视差和最小距离分
类器对图像分割块进行视差处理,同时对于较小的图像分割块进行
BLOB
滤波处理来获取较高精度的视差图.
实验结果表明,本算法能有效解决双目移动机器人周边环境中的低纹理和纹理相似视差精度差的问题,可快速
准确识别障碍.
关键词:立体匹配;可信点;双目移动机器人;最小分类器
中图分类号:
TP39
1.
4
文献标志码
:A
文章编号:
0254
-0037(2011
)05
-0675
-08
双目移动机器人通常由
3
部分组成:移动机构、双目立体视觉感知系统和控制系统,其中双目立体视
觉感知系统利用
2
个平行放置的摄像机模仿生物的视觉系统来获取周围环境的三维信息,进而实现目标
识别、环境地图生成和视觉导航与定位等复杂任务.随着硬件处理器性能的大幅度提高和视觉处理算法
的不断优化,双目立体视觉感知系统的硬件瓶颈不复存在,计算精度也大为提高,因而近年来双目立体视
觉感知系统在智能机器人环境感知方面得到了广泛的应用[
1-3]
双目立体视觉感知系统的关键问题是立
体视觉匹配.传统的立体匹配算法主要有:
1
)基于像素相似度区域匹配算法.这类算法可以得到稠密的视差图,但在低纹理或者纹理相似区域
效果不佳[
4]
2)
基于特征的匹配算法,这类算法只能获得稀疏的匹配点,这些点仅能句勒出物体的大致轮廓,但不
能呈现细节部分
[5]
3)
基于全局最优的匹配算法将立体匹配问题转为对每个像素点分配全局最优视差的问题,这类匹配
效果比较好,但时间复杂度大,无法满足机器人实时性要求[
6]
上述算法都没有同时解决立体视觉匹配的
2
个难点:对应点的匹配精度以及匹配算法的实时性
问题
[7]
为了能同时解决匹配精度和实时性问题,许多学者开展了大量的工作,其中
Tao
、
Li
、
Bleyer[8-
1I]等提出
的基于图像分割的立体匹配算法是一个有可能最终解决该问题的算法框架.该框架基于平滑表面假设,
像素灰度值相似的区域内其像素的深度值一般也相同,而且这些区域往往描绘的是现实世界中的平面场
景.基于这个假设,可把基于全局匹配算法中对每个像素点分配最优视差的问题转化为对每个区域分配
最优平面视差的问题,从而降低算法时间复杂度.该算法框架的视差模型公式为
d
(I)
= L
d(
B.)
、,/
1
/·、
其中
,
d
(I)
为立体图像对之间的对应视差川
(B.)
为第
i
个图像分割块矶的最可信视差.
收稿日期:
2009-06-1
1.
基金项目:国家"八六三"计划资助项目
(2006AAI2Z30
7)
.
作者简介:王贵财
(1979
一)
,男,山西宁武人,博士研究生;崔平远(
1961-)
,男,山东青岛人,教授,博士生导师.
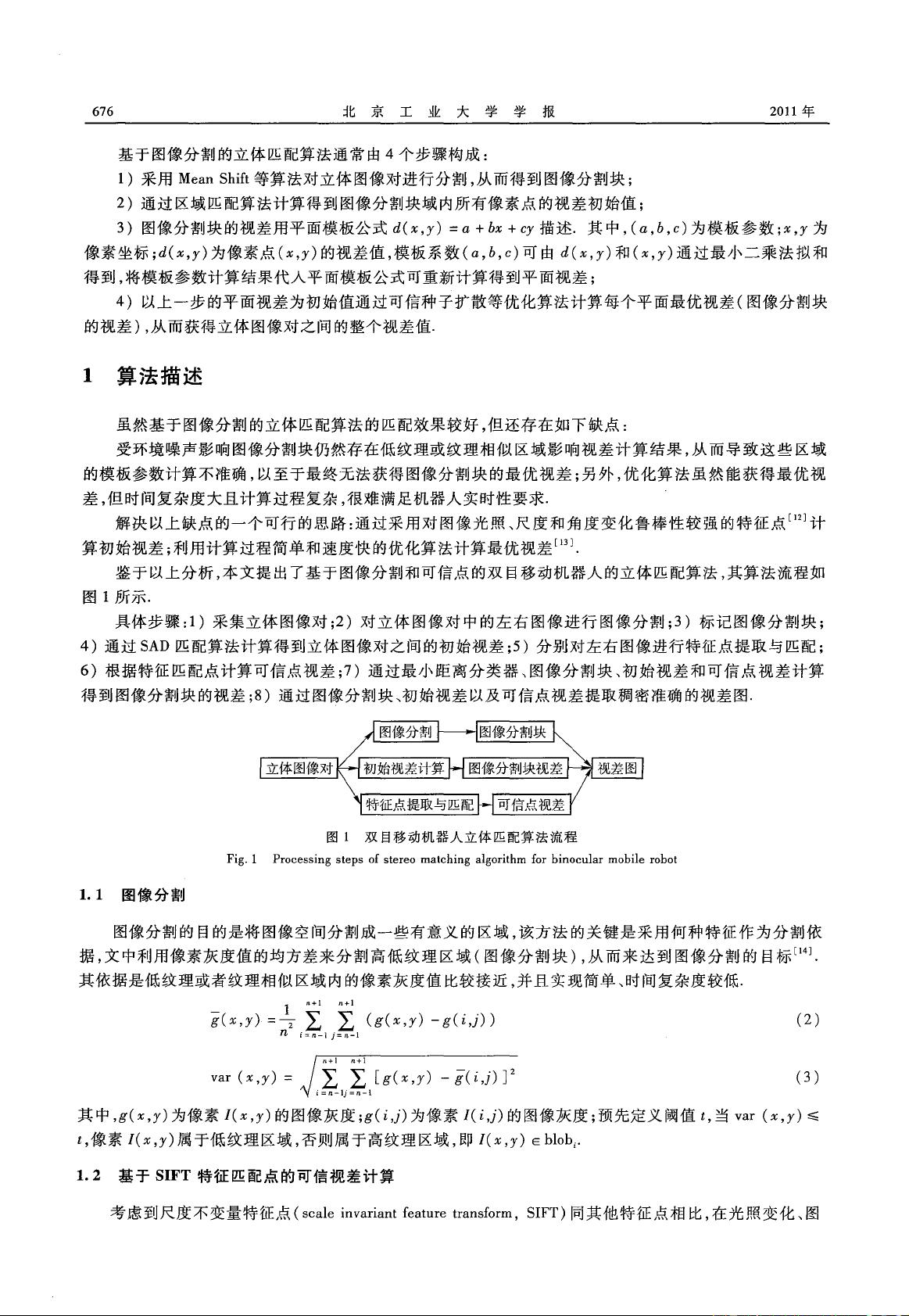
剩余7页未读,继续阅读
资源评论


weixin_38687343
- 粉丝: 6
- 资源: 903









最新资源
- BurpLoaderKeygen
- 工具变量-A股上市公司企业盟浪esg评级数据(2018-2022年).xlsx
- 施工人员检测26-YOLO(v5至v9)、COCO、CreateML、Darknet、Paligemma、TFRecord、VOC数据集合集.rar
- springboot靓车汽车销售网站(代码+数据库+LW)
- java区块链项目模块代码.zip
- C++按层次遍历二叉树.zip
- 施工人员检测22-YOLOv9数据集合集.rar
- 工具变量-乡村旅游指标数据2007-2021年.xlsx
- Rive在Android上的简单应用
- 施工人员检测20-YOLO(v5至v9)、COCO、CreateML、Darknet、Paligemma、TFRecord、VOC数据集合集.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


