
基于基于ARM+DSP的嵌入式四轴运动控制器设计的嵌入式四轴运动控制器设计
动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC
及低端微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。为解决精密制造
对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用DSP运
动控制芯片PCL65045BL组合的嵌入式四轴运动控制器。
导读:动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端
微控制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技术的日益成熟,嵌人式
运动控制器已经初露锋芒。
运动控制系统已被广泛应用于工业控制领域。近年来,工业控制对运动控制系统的要求越来越高。传统的基于PC及低端微控
制器日渐暴露出高成本、高消耗、低可靠等问题,已经不能满足现代制造的要求 。随着嵌入式技术的日益成熟,嵌人式运动
控制器已经初露锋芒。基于ARM技术的微处理器具有体积小、低成本、低功耗的特点,决定其在运动控制领域具有良好的发
展前景。
PCL6045BL是一种新型专用DSP运动控制芯片,它具有强大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺服
控制。为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,文中给出一种基于ARM 微处理器S3C2440
与DSP专业运动控制芯片PCL6045BL构成的嵌入式四轴运动控制器。该运动控制器具有高性能、低成本、体积小、可独立运
行等特点,可以满足运动控制系统高速、高精度的 要求。它可广泛应用于雕刻机、机器人、绣花机以及数控加工等工业控制
领域。
为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用DSP
运动控制芯片PCL65045BL组合的嵌入式四轴运动控制器。硬件上该控制器采用ARM+DSP的主从式双CPU结构,结合ARM
在人机界面显示、通信接口方面的优势以及PCL6045BL高控制精度的优点。软件上在S3C2440上移植μC/OS-II实时操作系统
来管理运动控制系统。该控制系统通用性较强,可广泛应用于雕刻机、机器人、绣花机以及数 控加工等工业控制领域。
1 系统总体设计
嵌入式四轴运动控制器主要由硬件部分和软件部分构成。
硬件主要包括S3C2440嵌入式主控板和PCL6045BL运动控制板两个部分。S3C2440嵌入式主控板和PCL6045BL运动控制板
之间通过通用的IDE通信接口进行连接。
软件方面在硬件平台的基础上移植S3C2440实时嵌入式操作系统,设计Boot Loader、外设驱动以及运动控制系统的应用程
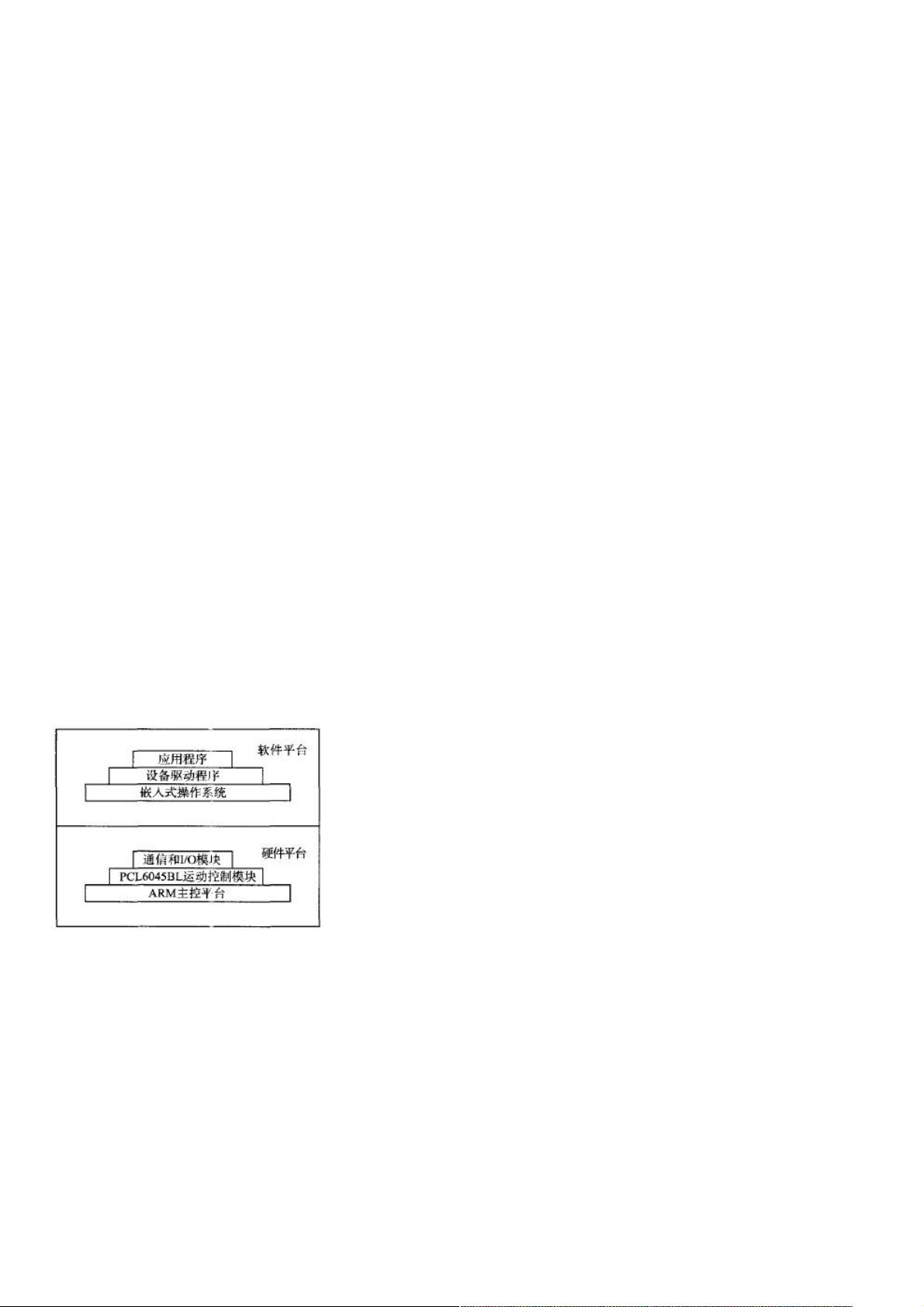
序。采用上述的软硬件平台,嵌入式运动控制器可以达到开放性能好、精度高的要求。本嵌入式四轴运动控制器的结构如图1
所示。
图1 嵌入式四轴运动控制器的构成
图1 嵌入式四轴运动控制器的构成
ARM具有丰富的片内外围电路,如USB接口、IIS接口、LCD控制器等,在人机界面的显示、通信接口以及系统移植方面具有
更强大的功能。PCL6045BL运动控制芯片速度快,可靠性高,性能好,在运动控制方面有很大的优势。
实时操作系统μC/OS-II包含了实时内核、任务管理、时间管理、任务间通信同步和内存管理等功能,可以使各个任务独立工
作,互不干涉,很容易实现准时而且无误地执行,使实时应用程序的设计和扩展变得容易,使应用程序的设计过程大为减化
。将S3C2440处理器、PCL6045BL 以及μC/OS-II三者的优势应用到本嵌入式四轴运动控制器中可以使其具有强大的功能,并
缩短开发时间。
本嵌入式四轴运动控制器以S3C2440为主控平台,在ARM上移植μC/OS-II实时操作系统来进行人机界面的显示、I/O的管理、
任务问的通信、指令的编译等工作。PCL6045BL运动控制模块主要负责位置控制,插补驱动,速度控制。用户的指令通过
S3C2440指令编译系统的编译,通过与PCL6045BL之问的专用通信接口来控制DSP运动控制芯片发出脉冲以达到使伺服电机
高速运行。
2 系统硬件设计
资源评论


weixin_38677306
- 粉丝: 4
- 资源: 916









最新资源
- matlab代码 基于随机森林的数据分类,代码注释详细,数据可以随意更,只需替Excel文件,附运行视频
- 物料研磨机step全套技术资料100%好用.zip
- 基于EMD-ARMA的组合风光出力预测方法 利用emd经验模态分解将原始发电数据分解为多个本征模态函数,采用arma自回归移动平均算法对分量进行分析,通过训练数据建立自回归移动平均模型,将预测分量叠加
- ddns-go 6.7.7版本 ddns软件 适用于 ubuntu x86-64
- 西门子s7-1200仿真模拟电梯程序1215+ktp700四层仿真电梯,新手入门经典案例,学会了思路不管是多少层都可以写,不过只是工作量增加而已,程序全部为LAD编写,程序段都会有注释 变量全部为中文
- abb机器人外部启动,博图v16,FB功能块,送西门子与abb机器人profinet通讯配置说明,程序含gsd,需要实体机器人有888-2或者888-3选项,否则只能硬接线了,一般机器人自带板卡是ds
- 电力系统有功无功协同优化 软件:matlab+yalmip+cplex 研究内容:模型提供了一个很好的创新思路,把常规电气互联系统的调度和有功无功优化结合起来,增加可再生能源无功、电容器、SVC、OL
- 香烟拆烟机sw20可编辑全套技术资料100%好用.zip
- 西门子s7 200smart与台达伺服电机 运动控制的学习,目标:用触摸屏和西门子smart 控制 器件:西门子s7 200 smart PLC,台达伺服电机,昆仑通态触摸屏(带以太网),中途可以加
- 卡通滑滑梯飞鸟素材幼儿园教学课件模板.pptx
- 卡通小雪人素材元素小学教学课件模板.pptx
- 6个电池均衡,buckboost电路,精度高,均衡速度快
- 五轴四联动数控电解加工机床(sw14+说明书+cad)全套技术资料100%好用.zip
- 感应电机 异步电机模型预测磁链控制MPFC 感应电机MPFC系统将逆变器电压矢量遍历代入到定子磁链预测模型,可得到下一时刻的定子磁链(定子磁链参考值可由等效替得到),将预测得到的定子磁链代入
- 感应电机 异步电机模型预测磁链控制MPFC 感应电机MPFC系统将逆变器电压矢量遍历代入到定子磁链预测模型,可得到下一时刻的定子磁链(定子磁链参考值可由等效替得到),将预测得到的定子磁链代入
- 二十.核心动画 - 新年烟花:资源及源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


