
第
29
卷第
2
期
振动与冲击
JOURNAL
OF
VIBRATION AND
SHOCK
Vo
l.
29
No.2 2010
基于区域极点配置的汽车主动悬架
H
2
/H
∞控制
孙涛,郑松林,张振东,冯金芝
(上海理工大学机械工程学院汽车工程研究所,上海
200093)
摘
要:利用泪合
H
2
/H
∞控制方法设计了某重载车辆悬架控制器。以此种方法设计出的控制器,通过
ι
控制指
标保证被控对象约束输出传递函数的元穷范数低于适当
γ
值的同时,最小化一个给定的
H
2
性能指标函数,较好的解决了
悬架系统性能和系统鲁棒性之间的折衷优化控制问题,同时,通过将闭环极点配置在指定位置,保证了系统的动态性能,
结果显示,通过将单一范数(风或
H
∞)控制方法改进为海合范数风/凡控制方法,强化了每种范数各自的优势,系统综合
性能品质得到了保证。
关键词
:
t
昆合
H
2
/H
∞控制;主动悬架;频率加权函数;未建模动态不确定
中图分类号
U463.33
文献标识码
A
悬架系统是路面车辆的重要的子系统之一,对改
善车辆行驶平顺性和提高操纵稳定性起着重要的作
用。被动悬架的工作特性无法随行驶工况的不同而动
态的改变,主动悬架系统则可通过可控执行机构提供
满足车辆行驶性能要求的力和力矩,因此,可以在较大
程度上提高车辆的平顺性能。围绕主动悬架系统所进
行的控制算法设计为大量的学者所研究
[1
-3]
。然而,
由于路况、工况及执行机构特性的复杂性,导致主动悬
架未建模动态不确定性以及外部扰动、传感器噪声对
系统性能的影响难以忽略,此时,控制器的设计应该兼
顾系统扰动抑制作用下的时域
LQG
性能指标和未建模
不确定性存在条件下的鲁棒性能指标。即控制器的设
计应考虑
H
2
范数和
H
∞范数的协调与折衷,以平衡闭
环系统对扰动抑制性能和鲁棒稳定性的需求。
文献
[4
,
5]
从各自不同的角度分析了
H
2
控制对系
统鲁棒性需求上的局限性,以及在悬架控制器设计上
利用两种范数混合折衷设计的有效性
,
Jager[6]
设计了
鲁棒
H
2
控制器,陈虹
[7]
教授等人针对主动悬架系统设
计了基于混合范数性能度量的多目标输出反馈控制
器,以便克服单一范数度量下
,
H
∞控制保守性大
,
H2
控
制鲁棒性不强等各自缺陷,在系统稳定性和性能上获
得的良好的折衷。钟志华
[8]
院士等人设计了基于遗传
算法的主动悬架,并对多目标控制器的保守性进行了
研究。陈元畏
[9]
教授等人针对四自由度车辆主动悬架
模型的多目标混合
H
2
/H
∞控制器设计进行了研究。上
述文献均对混合范数度量意义下的多目标控制器设计
给出了各自的解决方法,但是,并未给出混合范数度量
系统性能的范数折衷选取方法,以及为保证系统性能
而必须的极点配置的方法,因此,本文针对这一问题将
基金项目:上海市自然科学基金项目(
IOZR1421000)
;上海市科研创新
项目
(08YZ99)
;上海市重点学科建设项目
(J50503
)
收稿日期
2008
-10
-15
修改稿收到日期
:2009
-
04
-
21
第一作者孙涛男,博士,
1974
年生
输出分为不同的通道,利用风范数度量扰动作用下的
时域
LQG
性能指标,利用
H
∞范数度量未建模动态不
确定性作用下的频域鲁棒性能指标,并采用基于区域
极点配置的方法改善系统的性能,设汁主动悬架输出
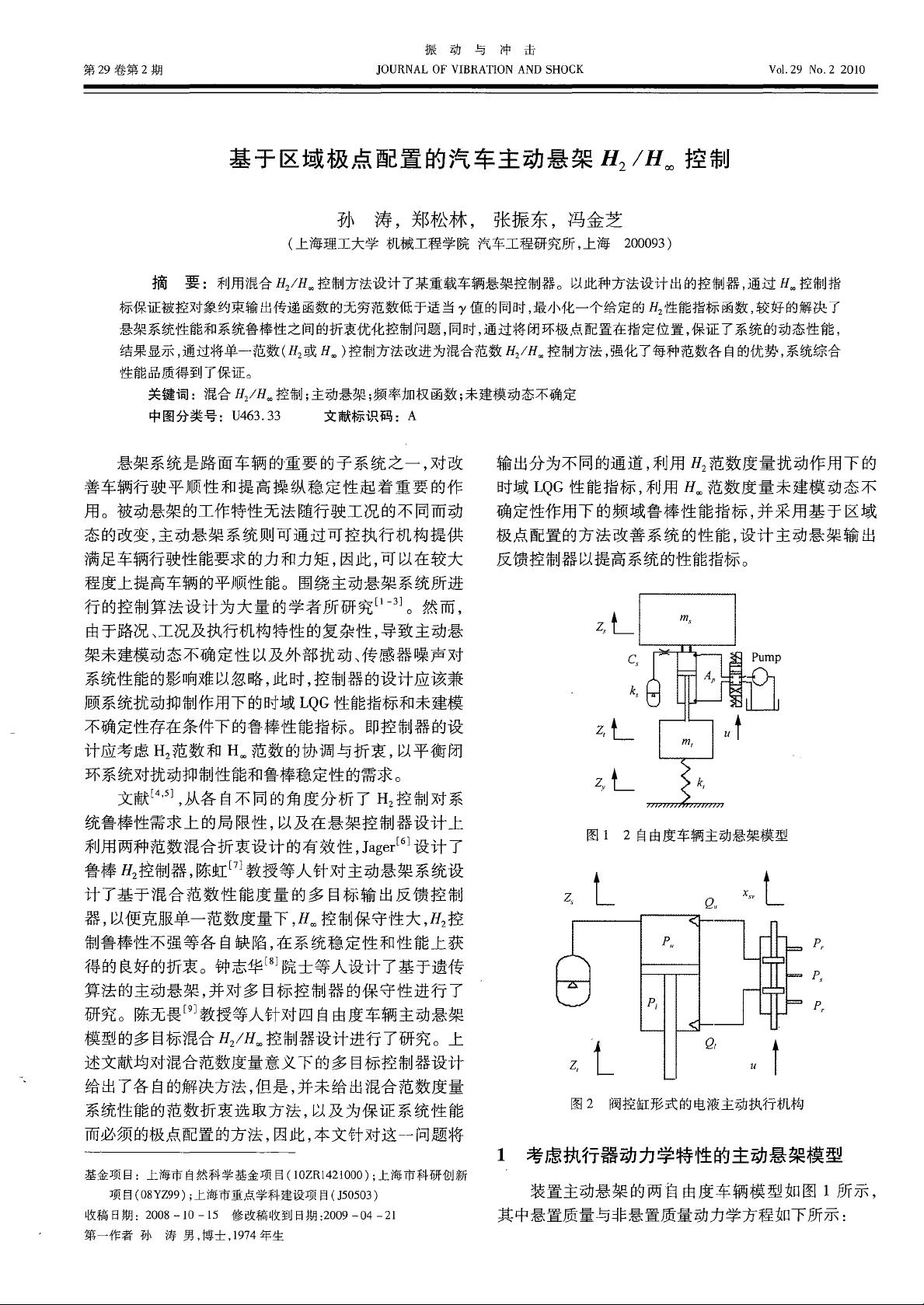
反馈控制器以提高系统的性能指标。
z, L
z, L
z, L
图
1
2
自由度车辆主动悬架模型
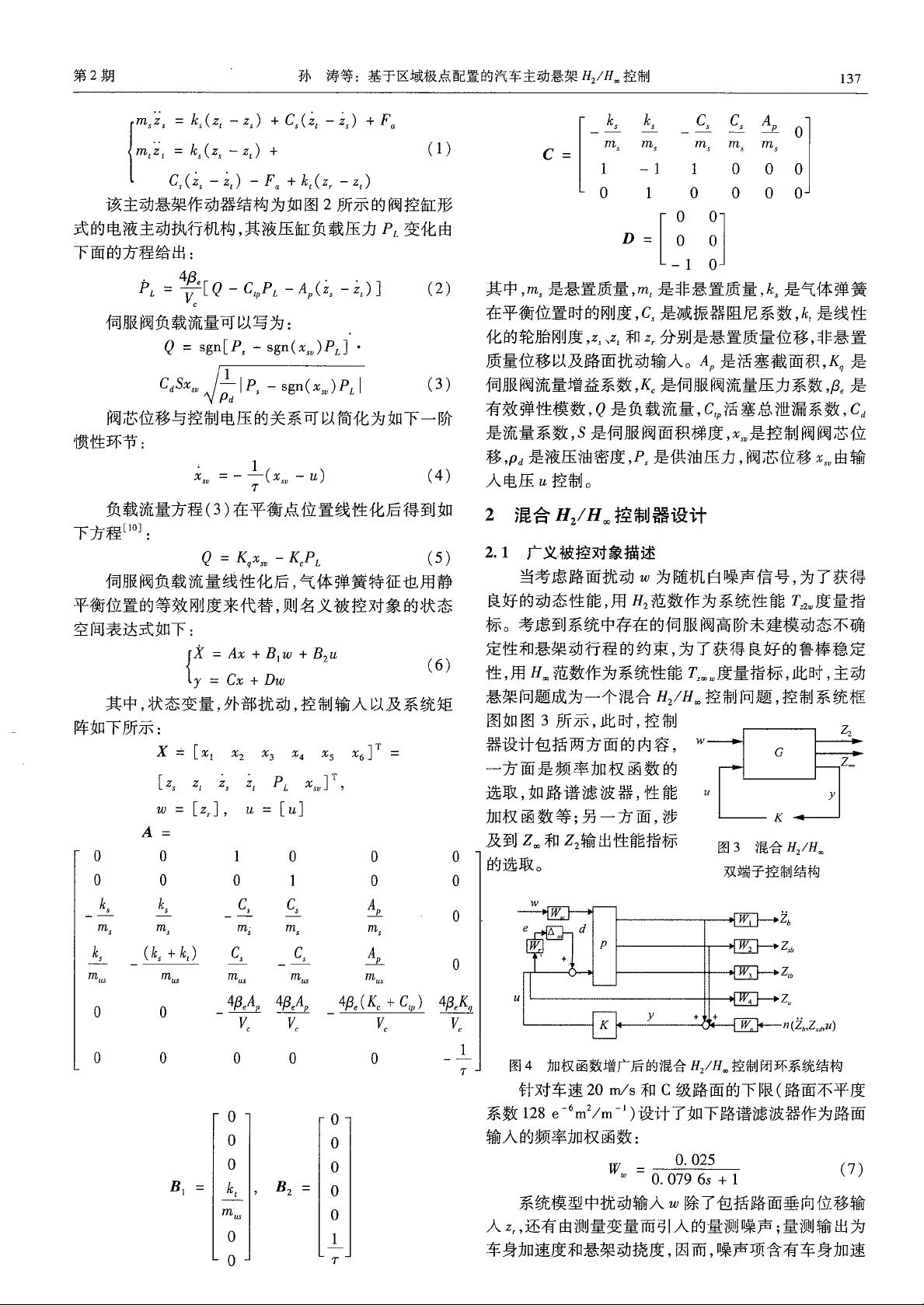
z, L
Q"X"L
P;
P,
P;
z, l
QI
A.
于
t'EBB
d
图
2
间控缸形式的电液主动执行机构
1
考虑执行器动力学特性的主动悬架模型
装置主动悬架的两自由度车辆模型如图
1
所示,
其中悬置质量与非悬置质量动力学方程如下所示:
剩余6页未读,继续阅读
资源评论


weixin_38665122
- 粉丝: 3
- 资源: 943









最新资源
- 基于labview的数字滚动条事件源码.zip
- 基于labview的使用鼠标画圆源码.zip
- 基于labview的使用键盘退出循环源码.zip
- 基于labview的贪食蛇源码.zip
- 基于labview的数字时钟源码.zip
- 基于labview的旋转数组源码.zip
- 基于labview的移位寄存器源码.zip
- 基于labview的远程开启VI源码.zip
- 基于labview的在N个脉冲后开始或结束连续采集源码.zip
- 基于labview的围棋源码.zip
- 基于labview的写入数据至用户指定的单元格源码.zip
- 基于labview的系统执行VI源码.zip
- 基于labview的指针提示源码.zip
- 基于labview的在windows explorer中直接生成VI源码.zip
- 基于labview的这个程序演示利用队列来实现数据的传引用源码.zip
- 2D gabor 滤波器方程Matlab代码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


