

Eur. Phys. J. C (2014) 74:2832
DOI 10.1140/epjc/s10052-014-2832-4
Special Article - Tools for Experiment and Theory
Implementation of a local principal curves algorithm for neutrino
interaction reconstruction in a liquid argon volume
J. J. Back
1,a
, G. J. Barker
1
,S.B.Boyd
1
, J. Einbeck
2
, M. Haigh
1
, B. Morgan
1
, B. Oakley
1
, Y. A. Ramachers
1
,
D. Roythorne
1
1
Department of Physics, University of Warwick, Coventry CV4 7AL, UK
2
Department of Mathematical Sciences, Durham University, Durham DH1 3LE, UK
Received: 23 December 2013 / Accepted: 19 March 2014 / Published online: 29 March 2014
© The Author(s) 2014. This article is published with open access at Springerlink.com
Abstract A local principal curve algorithm has been imple-
mented in three dimensions for automated track and shower
reconstruction of neutrino interactions in a liquid argon time
projection chamber. We present details of the algorithm and
characterise its performance on simulated data sets.
1 Introduction
Liquid argon time projection chambers (LAr-TPCs), that are
currently in development in various R&D programmes in
Europe, Japan and the USA [1], are acknowledged to be a
detector technology capable of meeting the physics require-
ments of a next-generation neutrino oscillation experiment.
They can provide simultaneous tracking and calorimetry of
particles from neutrino interactions over a wide range of ener-
gies, with exquisite millimetric granularity, as demonstrated
by results from ICARUS [2]. Despite this advantage, it has
proven difficult to achieve an automated software process
that can fully reconstruct neutrino interactions, which will
contain a mixture of ionisation tracks as well as electromag-
netic and hadronic showers, especially when the neutrino
interaction point is not known beforehand. In this paper, we
describe a first application of using local principal curves
[3] to automatically reconstruct neutrino interactions using
three-dimensional LAr-TPC data.
When a charged particle passes through a liquid argon
medium it releases a stream of ionisation charge which can
be measured by a TPC to provide a 3D trajectory in space. We
can represent this data as a collection of “hits”, each of which
contain the spatial cell co-ordinate information (x, y, z)as
well as the charge or energy deposit Q. The task of any
reconstruction algorithm is to first obtain the hits from the
detector output, then group these hits into clusters in order to
a
e-mail: j.j.back@warwick.ac.uk
identify the particles coming from the neutrino interaction,
before extracting physics parameters such as momentum or
energy from the reconstructed particles. Here, the first stage
of the analysis chain, hit reconstruction, is assumed to have
already taken place and the input is taken to be the complete
set of hits in three spatial dimensions. Our reconstruction
algorithm takes the collection of hits for each neutrino inter-
action (labelled as an event) and forms clusters of associated
hits in order to identify the particles. The mathematics and
logic behind the local principal curve procedure is described
in Sect. 2, while a description of the simulation methods
used to obtain samples of neutrino interaction events in liquid
argon is given in Sect. 3. The performance of the reconstruc-
tion algorithm is discussed in Sects. 4 and 6, with details
about using it for track-shower discrimination provided in
Sect. 5. Finally, we summarise our findings in Sect. 7.
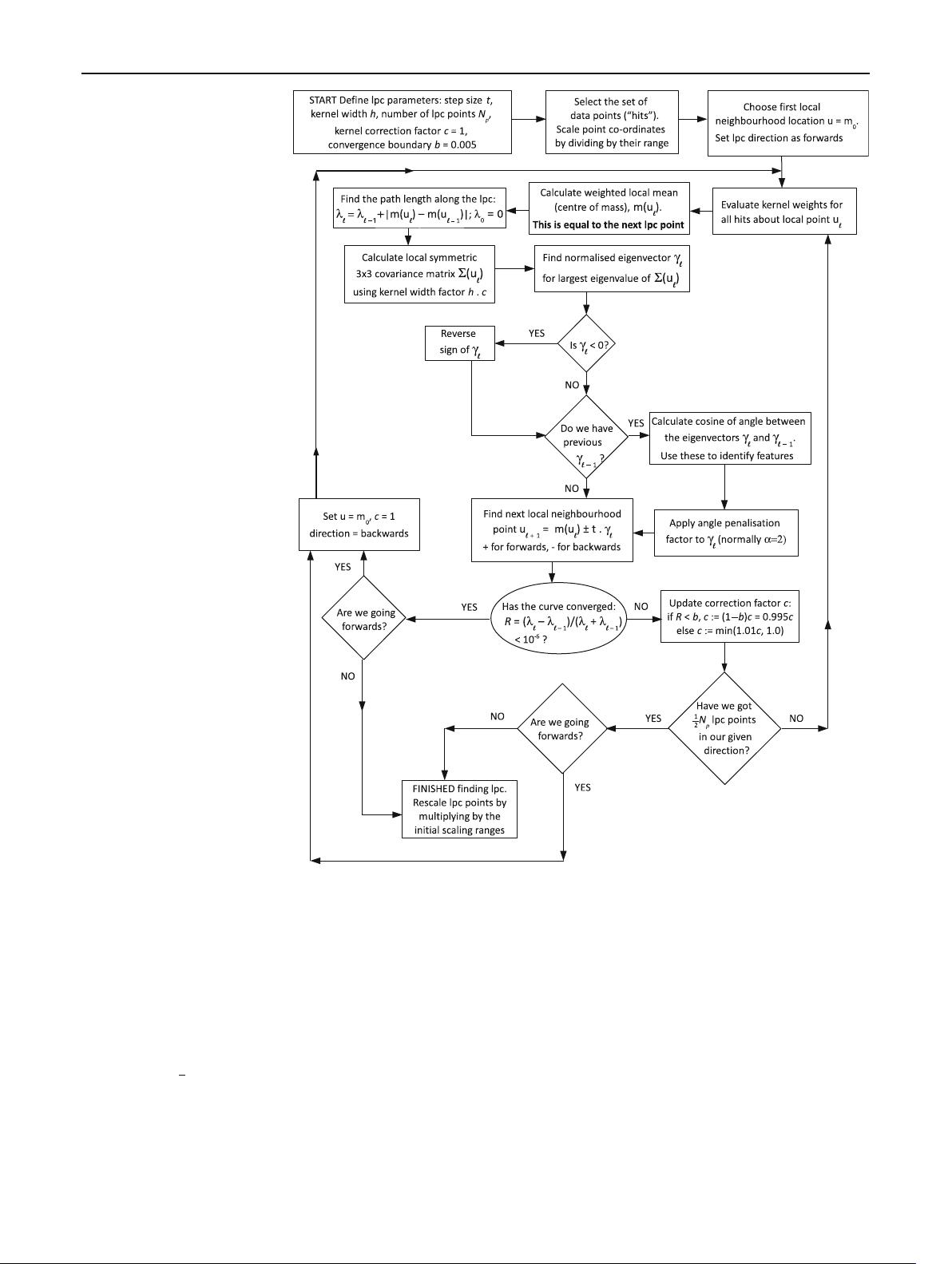
2 The local principal curve (lpc) algorithm
The key component of the method we are proposing is the
mean shift procedure, a versatile tool which is popular mainly
in the computer vision community [4]. In essence, the mean
shift moves a point to the local mean of the data around this
point. For our case, the points are the positions X
i
(x, y, z) of
all of the hits, which are each scaled by their range, defined
to be the difference between the largest and smallest values
of X
i
(though it is also possible not to scale at all, or to scale
by other measures of spread such as the standard deviation).
The local mean m(u) for a set of N hits is defined as
m(u) =
N
i=1
w
i
(u)X
i
N
i=1
w
i
(u)
, (1)
where t he weights w
i
(u), which determine the size and shape
of the local neighbourhood at a chosen location u, are mono-
123

剩余14页未读,继续阅读
资源评论


weixin_38663036
- 粉丝: 4
- 资源: 928









最新资源
- SoundManager.java
- 永磁同步电机参数调整与预测控制模块:时变工况下的参数不确定性与匹配策略,永磁同步电机参数调整与预测控制模块:时变工况下的参数不确定性与匹配策略,永磁同步电机参数不确定 参数变化 参数失配 参数摄动模块
- C++基础入门.pdf
- 软考-中级-网络工程师-知识点总结.docx
- ,《基于速度同步线性调频小波变换(VSLCT)的时频分析技术研究与应用》,速度同步线性调频小波变(VSLCT)VSLCT是当前线性变的扩展版本 它能有效地缓解拖尾效应,并能动态地响应条件变化提供所需
- ROS工程认知-ROS文件系统结构与编译系统详解
- 两极式三相光伏逆变并网仿真:基于MPPT算法与双环PI调节的LCL型三相逆变系统仿真模型,三相光伏并网系统仿真模型:研究Boost变换器MPPT算法与三相两电平LCL型逆变器的SVPWM调制及控制策略
- ROS环境中C++节点的构建与多节点协调运行机制探讨
- ROS通讯机制-话题通信详解及实例:构建发布/订阅模式实现异步通信
- 优化后的PFC2D颗粒离散元数值模拟试验合集:直剪、单轴与双轴压缩并行高效运行代码集,优化后PFC2D颗粒离散元数值模拟试验合集:高效单直剪与单双轴压缩并行运行代码集,该模型是一个PFC2D颗粒离散元
- 第五次课程服务组实验1:基于仿真的机器人及其应用环境
- 【business-jxd】
- 第6次课 ROS服务.docx
- Abaqus铁路轨道建模及车轨耦合动力响应分析:车轨地基相互作用与弹簧批量施加研究,Abaqus铁路轨道建模及车轨耦合动力响应分析:车轨地基相互作用与弹簧批量施加研究,Abaqus铁路轨道建模,车轨耦
- PCAN-Basic-Windows.zip
- 从0到1的网络安全专家之路 二进制安全和Web安全.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


