
№ .2 陕西科技大学学报 Apr .2005
Vol .23 JOU RNAL OF SHAANXI U NIV ERSIT Y OF SCIENCE & TECHNOLOGY
· 83 ·
磁
文章编号 :1000 - 5811(2005)02 - 0083 - 04
一 种 模 糊 P ID 控 制 器 的 设 计 方 法 研 究
侯勇严 ,郭文强
(陕西科技大学电气与电子工程学院 ,陕西 咸阳 712081)
摘 要 :介绍了一种基于模糊控制的自适应 PID 控制器 ,总结出了这种 PID 控制器的控制特
点及其参数设计规律 。 仿真结果表明 ,这种模糊 PID 控制器具有超调量小 、调节时间短的优
点 ,提高了控制系统的实时性和抗干扰能力 ,特别是对非线性和时变性的复杂控制系统具有良
好的控制效果 。
关键词 :模糊控制 ;自适应 ;PID 控制
中图分类号 :T P273 文献标识码 :A
0 引言
模糊控制是以模糊集合论 、模糊语言变量及模糊逻辑推理为基础的计算机智能控制 ,其优点是不要求
掌握被控对象的精确数学模型 ,而根据人工控制规则组织控制决策表 ,然后由该表决定控制量的大小 。 模
糊 PID 控制器的基本思想是将模糊控制理论和常规 PID 控制结合起来 ,以偏差 e 和偏差变化 ec 作为输
入 ,利用模糊控制规则在线对 PID 参数进行修改 ,使其既具有模糊控制灵活而适应性强的优点 ,又具有传
统 PID 控制的广泛适用性和控制精度高的特点
[1]
。 本文设计了一种基于模糊控制的自适应 PID 控制器 ,
并总结了这种模糊 PID 控制器的参数设计规律 。
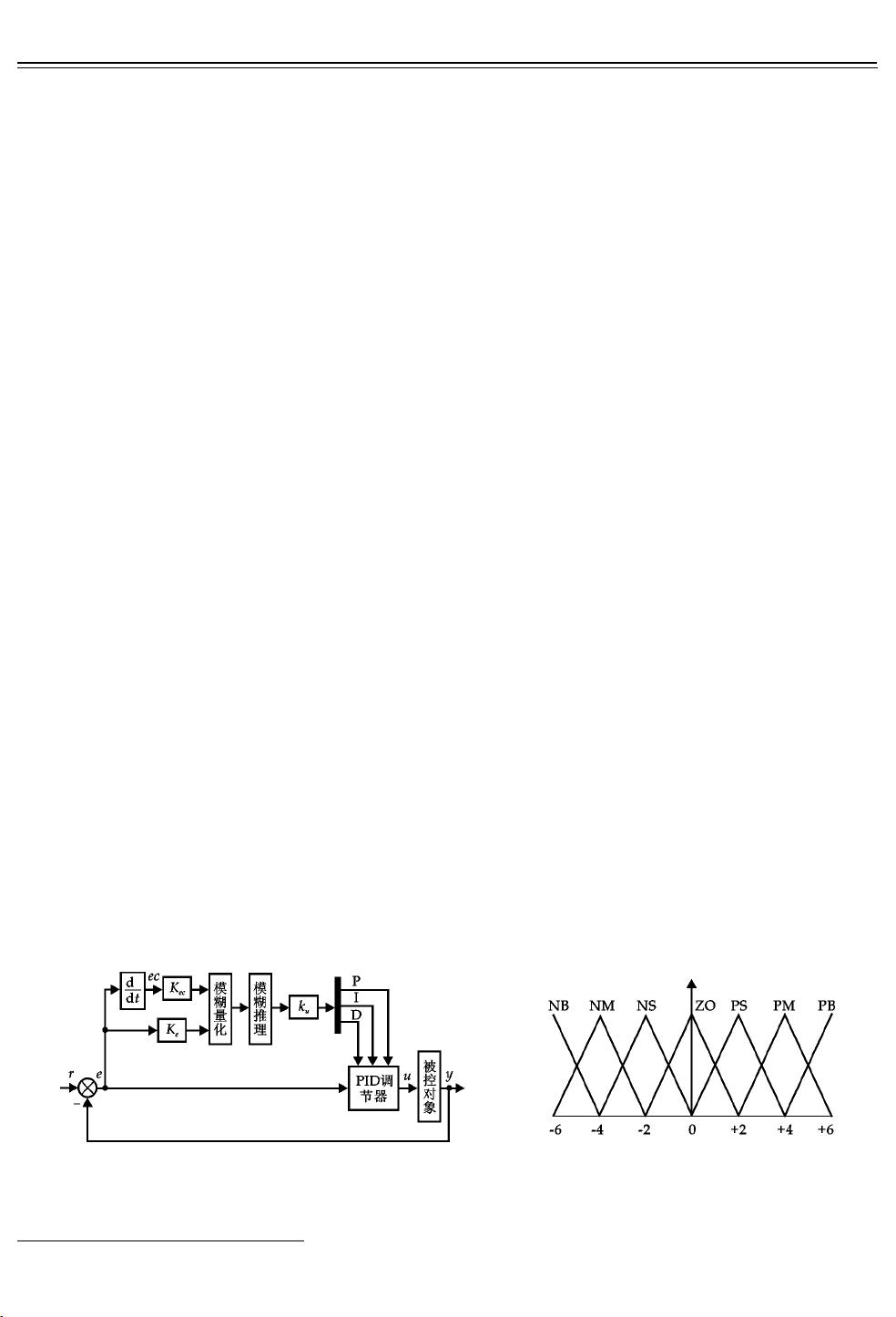
1 模糊 PID 控制器的结构图
图 1 是一种自适应模糊 PID 控制器的结构图 ,它采用一个两输入 、三输出的模糊控制器 ,以偏差 e 和
偏差变化 ec 作为模糊控制器的输入 ,利用模糊控制规则在线对 PID 参数进行修改 ,并以 PID 参数的修正
量(
Δ
K
P
,
Δ
K
I
,
Δ
K
D
)为输出 ,以满足不同时刻偏差和偏差变化对 PID 参数整定的要求 。
图 1 模糊 PID 控制器的结构图 图 2 e 、ec 及
Δ
K
P
、
Δ
K
I
、
Δ
K
D
的隶属函
数曲线
磁
收稿日期 :2004 - 09 - 12
作者简介 :侯勇严 (1972 - ) ,女 ,陕西省咸阳市人 ,硕士 ,研究方向 :智能控制
资源评论


weixin_38648037
- 粉丝: 0
- 资源: 929









最新资源
- Annotations_Train_abstract_v002.zip
- ap5030dn-openwrt-ath79-generic-huawei-ap5030dn-initramfs-kernel
- 华为AP无线接入控制器学习资料
- 金铲铲S13双城之战自动拿牌助手2.0
- Sigrity Power SI 仿真分析教程与实例分析.rar
- 基于Vue和JavaScript的掌上生活超市小程序配送解决方案设计源码
- 基于Java和安卓基础知识的简易记事本设计源码
- 基于SaToken轻量级Java权限认证的XrSaTokenVue Vue设计源码
- 基于Java语言的RxTool设计源码集合
- PHP性能检测扩展XHProf与FirePHP线上调试工具详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


