

International Journal of Robotics and Automation, Vol. 25, No. 3, 2010
THE DESIGN, MODELLING AND
IMPLEMENTATION OF A MINIATURE
BIOMIMETIC ROBOTIC FISH
C. Zhou,
∗
Z. Cao,
∗
S. Wang,
∗
and M. Tan
∗
Abstract
This paper proposes a miniature biomimetic robotic fish based on
a single joint with a compact structure, high manoeuvrability and
multiple sensors, and a model of freely swimming situation is built
based on Lagrangian function. The robotic fish mimics the motion
of Thunniform fish, and methods of propelling, turning and C-sharp
turning are given. To model the motion of robotic fish, the fluid
force acting on the robotic fish is divided into three parts. By
solving Lagrange’s equation of the second kind, the movement and
motion parameters of robotic fish are obtained. Simulated results
of motions are given, and experiments are carried out to verify the
model.
Key Words
Miniature robotic fish, biomimetic motion, kinematic modelling,
parameter optimization
1. Introduction
There are more and more productive underwater activi-
ties and research works, which make the existing under-
water equipments cannot satisfy changing requests, and
autonomous underwater vehicle (AUV) has received much
attentions. Attracted by fish with high efficiency, high
manoeuvrability and low noise, roboticists explore fish-like
underwater robots or robotic fish to develop small size,
efficient, manoeuvrable and low noise AUVs [1]. The
development of miniature robotic fish offers great advan-
tages for specialist underwater requirements associated
with pipelines and gaps, such as exploration, mining, ecol-
ogy etc. Additionally, miniature robotic fish can poten-
tially be manufactured cheap enough to be mass-produced,
which may enhance the quality of the solution by coop-
eration among them. A biomimetic robotic fish can be
defined as an aquatic vehicle propelled by bionic undu-
latory fins, usually with the undulatory/oscillatory body
∗
Laboratory of Complex Systems and Intelligence Science, In-
stitute of Automation, Chinese Academy of Sciences, No. 95,
Zhongguancun East Road, Beijing 100190, China; e-mail:
{zhouchao, zqcao, swang, tan}@compsys.ia.ac.cn
Recommended by Dr. Paolo Remagnino
(10.2316/Journal.206.2010.3.206-3316)
and fins motions. Investigations of biomimetic robotic fish
have provided significant insights into both theory and ap-
plication in recent years [2, 3]. These advantages are of
great benefit to applications in marine and military fields.
Many theories are proposed to explore the secrets of fish
swimming mechanisms and summarize driving modes of
fish motions. Based on these theories, many prototypes
of biomimetic robotic fish have been developed. Some
works are done on the motion model [4–6] and control of
robotic fish [7, 8]. McIsaac and Ostrowski [4] and Cort´es
et al. [5] gave a Lagrangian model, reduced by Lie group
symmetries, for a symmetrical structure robot eel. Boyer
et al. [6] present the dynamic modelling of a continu-
ous 3-D swimming eel-like robot. In previous project in
our lab, a series of multi-link robotic fish prototype are
finished, and the control, information procession, co-
operation and 3D locomotion of them are studied
[9, 10].
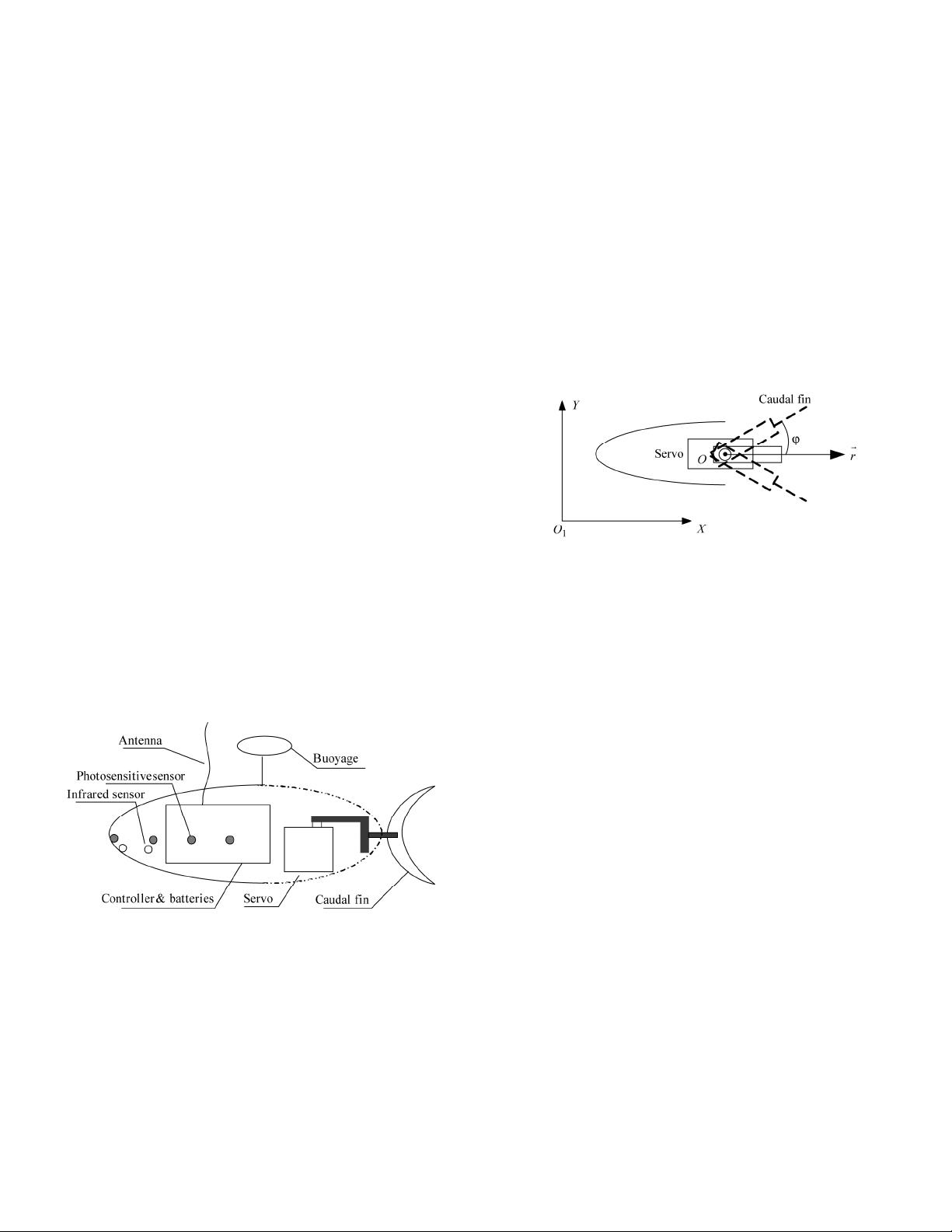
In this paper, the design of a miniature biomimetic
robotic fish is given based on single joint undulating.
The prototype is 15-cm long and integrates the control
system, wireless communication module, battery power,
servo, infrared and light intensity sensors. The robotic
fish may execute tasks independently and autonomously
by the control law. To deal with the model problem
of our fish, a model is given in this paper for freely
swimming without the assumption of non-oscillatory fish
head. The model is based on Lagrangian function and
a simplified hydrodynamic model, the two of which are
connected by the Lagrange’s equation of the second kind.
The kinematics–dynamics model is got in the form of a set
of partial differential equations.
By considering the coupling of the kinematic law in
continuous motions and the force acted on robotic fish,
both of which cannot be calculated respectively, the La-
grangian function of the freely swimming robotic fish is
built. In this model, the robotic fish is simplified to jointed
plates. The kinematic model of this robotic fish is given to
discuss the propulsion, which is based on the Lagrange’s
equation and the hydrodynamic force. Then, the move-
ment is calculated by solving the Lagrange’s equation of
the second kind. Based on this model, the kinematic pa-
rameters are calculated, and the amplitude and frequency
210
剩余6页未读,继续阅读
资源评论













