
基于双线阵相机的全视角高精度三维测量系统基于双线阵相机的全视角高精度三维测量系统
提出一种基于双线阵相机的全视角高精度三维测量系统,实现对空间大尺寸物体三维测量。首先,通过两台高
速线阵相机结合高精度单轴回转平台、高速图像采集卡对空间物体扫描成像,然后利用空间前方交会原理以及
空间三维测量系统定向解算出空间物体的实际空间三维坐标。该三维测量系统的优点是不必提前对线阵相机进
行内参标定,且自动化程度高,测量速度快。实验结果表明,该三维测量系统精度高,可以广泛地运用到大尺
寸空间测量领域,具有良好的实用价值。
熊群芳,陶青川,叶重阳
(四川大学 电子信息学院,四川 成都 610065)
摘要摘要:提出一种基于双线阵相机的全视角高精度三维测量系统,实现对空间大尺寸物体三维测量。首先,通过两台高速线
阵相机结合高精度单轴回转平台、高速图像采集卡对空间物体扫描成像,然后利用空间前方交会原理以及空间三维测量系统定
向解算出空间物体的实际空间三维坐标。该三维测量系统的优点是不必提前对线阵相机进行内参标定,且自动化程度高,测量
速度快。实验结果表明,该三维测量系统精度高,可以广泛地运用到大尺寸空间测量领域,具有良好的实用价值。
关键词 关键词:双线阵相机;三维测量系统;高精度
中图分类号 中图分类号:TN911.73;TN247文献标识码:ADOI: 10.19358/j.issn.1674-7720.2017.05.014
引用格式引用格式:熊群芳,陶青川,叶重阳.基于双线阵相机的全视角高精度三维测量系统[J].微型机与应
用,2017,36(5):42-45,49.
0引言引言
随着计算机机器视觉这一新兴学科的兴起以及科学技术和航天工业[12]的发展,非接触式空间三维测量系统在视觉测量
领域中占有越来越重要的地位。近几年,以经纬仪作为传感器,用两台或两台以上经纬仪配合计算机及相应的硬件、软件所组
成的空间坐标测量系统在工程测量以及计量学中得到广泛的应用[34]。经纬仪系统虽是非接触式的,但在测量的过程中必
须通过专用测量孔或粘贴瞄准靶标来指示目标,基准孔的制造误差对建立坐标系所带来的误差影响很大。基于非接触式面阵相
机的大尺寸测量系统[5],由于不需要逐点测量,实时性好,大大提高了测量效率,但由于面阵相机图像分辨率受限,需要
移动设备进行多位置测量,不能快速完成全尺寸测量。
针对传统经纬仪自动化程度低、测量精度低、面阵相机图像分辨率受限等不足,本文提出一种基于双目线阵相机的全视角
高精度三维测量系统,采用交会测量原理,结合高分辨率线阵相机、高精度回转平台、图像靶标提取等设备和方法,构建了一
个自动化程度高、测量速度快的全视角三维测量系统,可一次性实现空间物体大量特征点的三维坐标测量。
1测量系统基本原理测量系统基本原理
1.1空间前方交会原理空间前方交会原理
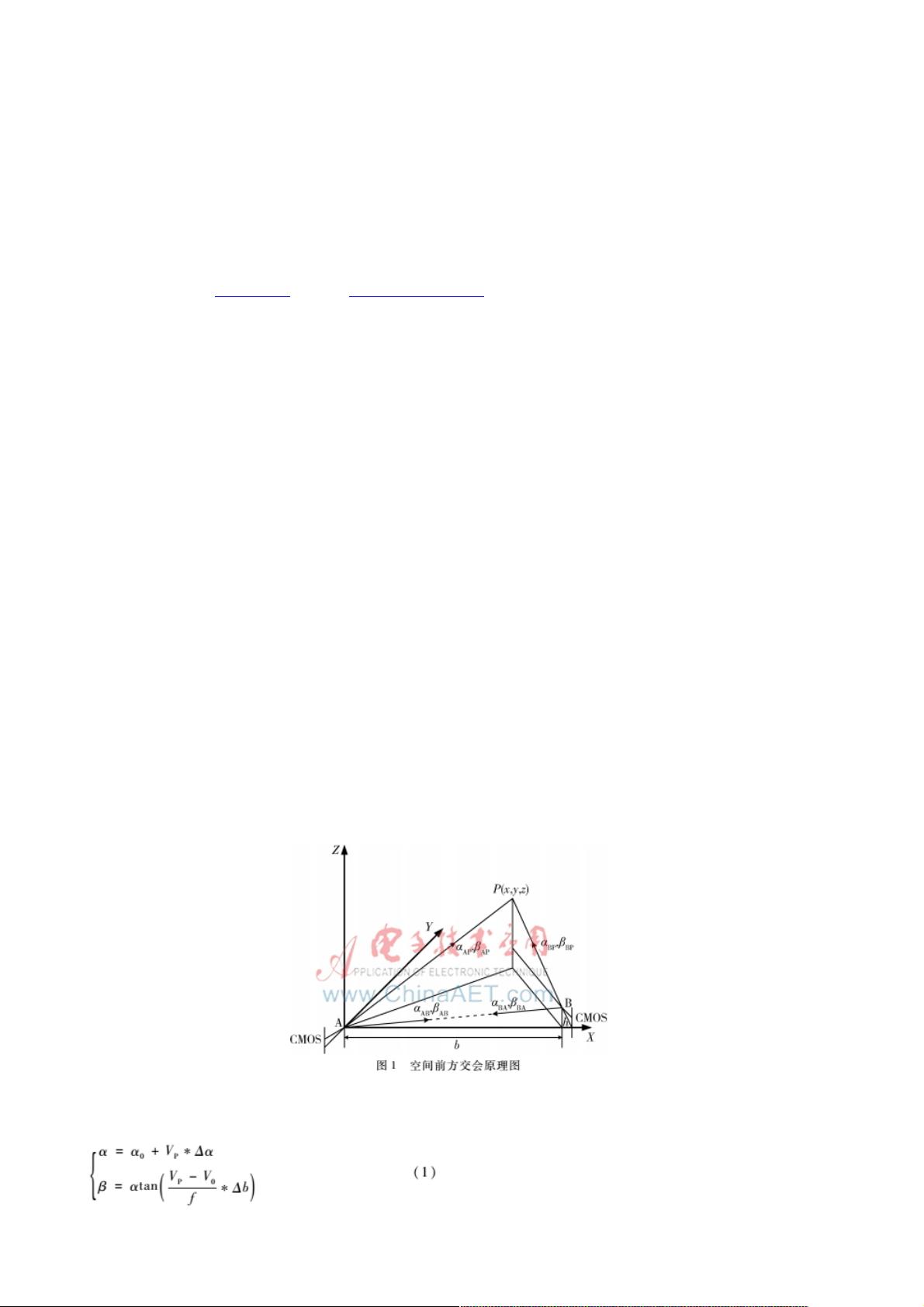
测量系统用两台相同的CMOS线阵相机以及高精度回转平台构成全视角高精度采集仪,采用空间前方交会原理[6]。如
图1所示,A、B两台采集仪,以A中线阵相机的光心为坐标原点,A、B连线在水平方向的投影为X轴,过A的铅锤方向为Z轴,
以右手法则确定Y轴,以此构成测量坐标系。
其中,A、B互瞄以及分别从A、B观测目标P的观测值(水平方向和竖直方向的旋转角度)分别为:αAB、βAB、αBA、
βBA、αAP、βAP、αBP、βBP,A、B两台采集仪扫描目标P的水平旋转角度和竖直旋转角度满足下式:
式(1)中,α为采集仪扫描目标P在水平面的水平旋转角度。α0为扫描靶标时的起始角度,由两个高精度回转平台给定,
资源评论


weixin_38635323
- 粉丝: 9
- 资源: 955









最新资源
- 番茄助手:vs2013-2022
- JSP在服装零售中的应用:销售管理系统设计与实现
- 手机和刀具检测16-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 网上花店:电子商务平台的设计与实现
- 自动控制原理-控制系统的数学模型实验
- 轨迹跟踪,考虑侧倾和曲率变化,同时修正侧偏刚度 simulink carsim联合仿真
- 高校勤工助学管理:系统设计与用户体验优化
- 手检测15-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- DEV-CPP-RED-PANDA
- 高通410随身WiFi ufi003 Debian固件
- abaqus齿轮动态分析,能够计算出mise应力等力学内容
- “互联网+”创新创业大赛创新奶茶店策划书.docx
- 《模拟电子技术》期末试卷.doc
- 电气控制及PLC试题库和答案复习提纲.doc
- 华南师范大学计算机网络试卷.doc
- 模拟电子技术基础期末试题.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


