
μC//OS-II的的CAN驱动程序设计驱动程序设计
实时性是衡量CAN现场总线系统性能的一个重要标准。本文提出一种采用μC/OS-II操作系统和I-CAN协议,在
应用层面上提高CAN总线系统实时性的驱动程序设计方案,并以分层的方式逐层阐述CAN驱动程序的设计过
程。
μC/OS-II是Jean J.Labrosse开发的一种小型嵌入式操作系统。它实质上是基于优先级的可剥夺型内核,系统中的所有
任务都有一个唯一的优先级别,适合应用于实时性要求较强的场合。本文采用μC/OS-II来设计CAN的驱动程序,以满足系统
的实时要求。
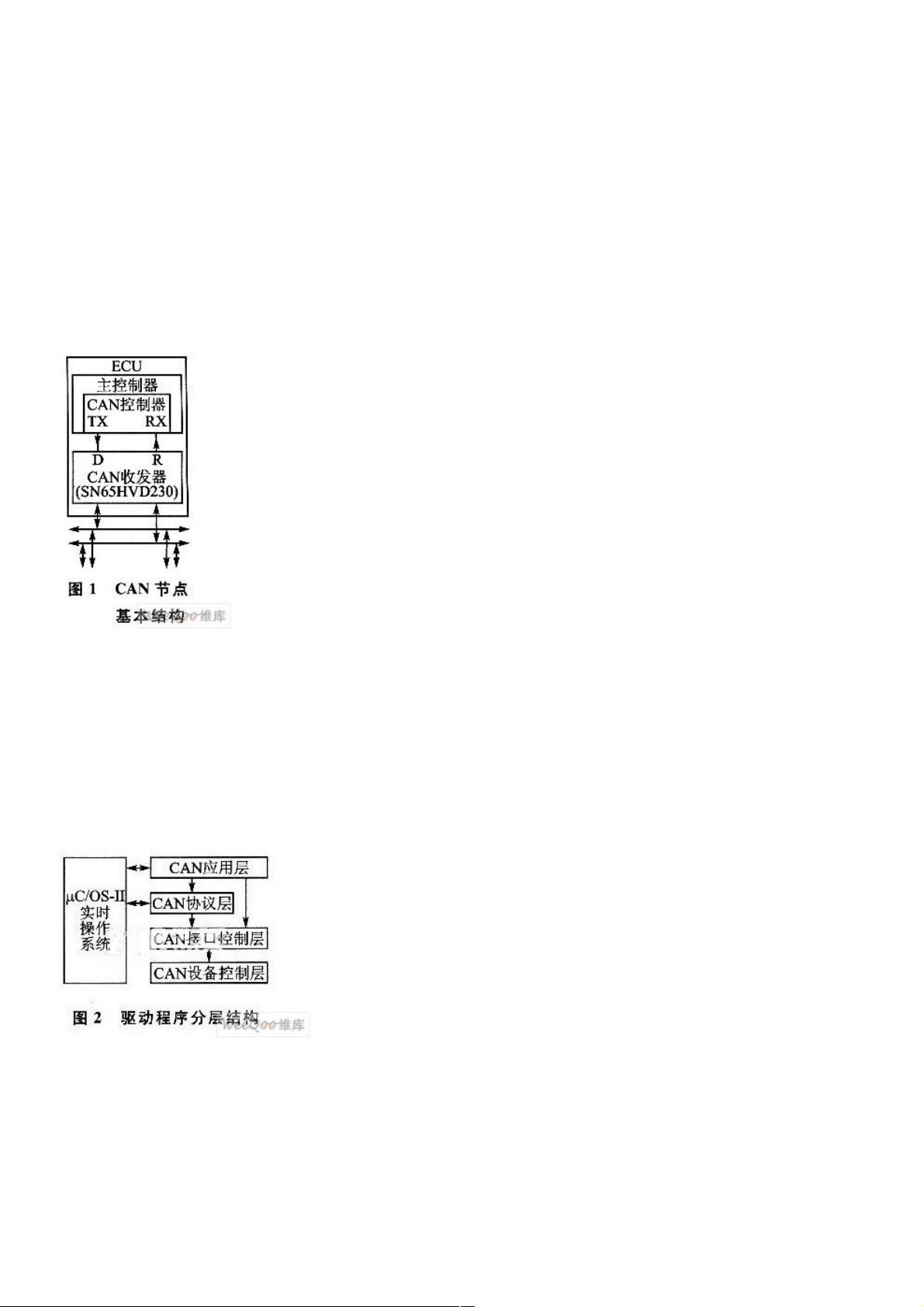
1 CAN节点的硬件设计节点的硬件设计
CAN节点是分布在CAN网络中进行相互通信的基本单元,主要由主控制器、CAN控制器和CAN收发器组成。本设计中,
节点的基本结构如图1所示。在CAN网络中,ECU(ElectrONic Control Unit)是指一个具有完整功能的CAN节点。
采用NXP公司的
LPC2368是一款3.3 V器件,虽然其对应的CAN收发器接口引脚能够承受5 V电压,但为了让CAN节点能够更稳定地运
行,这里采用TI公司的3.3 V CAN收发器SN65HVD230D与之配合使用。凭借高输入阻抗特性,SN65HVD230D可以在一条
总线上支持多达120个CAN节点,并且能够和5V的CAN收发器良好地兼容。本文重点介绍CAN驱动程序的设计方法。
2 CAN驱动程序设计总体思想驱动程序设计总体思想
为了使软件可移植性强、易于维护,采用分层的方法编写CAN驱动程序。驱动程序分层结构如图2所示。图中,双向箭头
表示实时操作系统μC/OS-II与CAN驱动程序之间的数据交换,单向箭头表示上层软件对下层软件的调用。
3 CAN设备控制层和设备控制层和CAN接口控制层接口控制层
CAN设备控制层的主要任务是:初始化主控制器与CAN控制器之间的连接配置,复位CAN控制器,建立主控制器和CAN
控制器之间的通信函数。由于LPC2368内部集成了CAN控制器,CPU可以通过内部APB总线接口对CAN控制器的所有寄存器
进行访问,所以不再需要编写设备控制驱动层程序,已经完全由硬件实现了。
CAN接口控制层主要任务是:实现CAN控制器的各种功能,如设置控制模式、发送数据、释放接收缓冲区、配置验收滤
波器等。这些操作都是通过读写CAN控制器的内部相关寄存器来实现的。
CAN控制器初始化程序(在应用层中实现,内部调用的函数也都是在该层中编写的)如下:
资源评论


weixin_38621150
- 粉丝: 3
- 资源: 879









最新资源
- 基于卷积神经网络的人脸识别全部资料+优秀项目+详细文档.zip
- 基于卷积神经网络识别面部表情(机器学习课程设计)全部资料+优秀项目+详细文档.zip
- 厚板碳素钢制压力容器的焊接方法控制.pdf
- 娱乐综艺异业合作营销策划方案.zip
- 机械设计汽车单用途缓冲器生产线上下料机step全套设计资料100%好用.zip
- 机械设计汽车天窗GPA修边打磨工作站(sw18可编辑+工程图+BOM)全套设计资料100%好用.zip
- 机械设计全自动对刀仪(sw可编辑+bom单+工程图)全套设计资料100%好用.zip
- 基于Python,通过神经网络训练锂离子电池使用相关数据,预测电池当前最大容量全部资料+详细文档+优秀项目.zip
- 基于C语言关于快递柜的数据结构大作业全部资料+详细文档+优秀项目.zip
- 基于Echarts和百度地图的地理大数据可视化项目全部资料+详细文档+优秀项目.zip
- 人工智能实战-从 Python 入门到机器学习.zip
- 基于Spark的电商用户行为分析大数据平台全部资料+详细文档+优秀项目.zip
- 基于python的电商产品评论数据情感分析全部资料+详细文档+优秀项目.zip
- 基于ssm开发的电力大数据,hadoop+python数据抓取全部资料+详细文档+优秀项目.zip
- 基于vue框架的大数据展示页面全部资料+详细文档+优秀项目.zip
- 基于Vue和SpringBoot的大病保险管理系统全部资料+详细文档+优秀项目.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


