
基于P87C591的CAN总线超声测距系统设计方案

需积分: 0 13 浏览量
更新于2020-10-22
收藏 185KB PDF 举报
移动机器人的安全避障问题一直是该项研究的基本问题,目前解决此问题的基本方法是采用多路超声波传感器通过适当的安装角度达到获取多路测量信息的目的。对于多路超声波传感器的扩展,一般是在机器人系统控制核心之上进行。这样做的缺点在于,超声波传感器的扩展占用了大量的系统硬件资源,另外大量的测量信息的处理也浪费了系统软件资源。针对这一问题,笔者采用CAN总线扩展多路超声波传感器的作法。
在移动机器人技术领域,安全避障是实现机器人自主导航的一个核心功能。为获取精确的环境信息,超声波测距传感器由于其低成本、高效能的特点,被广泛应用于机器人的障碍物检测中。然而,随着传感器数量的增加,传统的连接方式会消耗大量系统资源,影响机器人的整体性能。为解决这一问题,本文提出了一种基于P87C591单片机的CAN总线超声测距系统设计方案,旨在提高系统的效率和稳定性。
移动机器人在进行自主导航时,需要实时获取周边环境信息,以识别和规避障碍物。为了得到较为全面的环境信息,常常需要使用多个超声波传感器。在传统设计方案中,多路超声波传感器通常直接连接到机器人的控制系统中,但这种做法存在明显弊端。它会占用大量宝贵的硬件资源,如I/O端口和CPU处理能力。随着传感器数量的增加,软件需要处理的测量数据量也大幅增加,这不仅加重了CPU的工作负担,也容易造成系统资源的浪费,甚至影响到机器人的实时性能。
针对上述问题,作者提出了基于CAN总线的多路超声波传感器扩展方案。CAN总线作为一种成熟可靠的车载通信协议,具备良好的实时性和高传输速率,且能够有效管理多个节点之间的通信。CAN总线技术的引入,使得超声波传感器的数据传输不再完全依赖于机器人的主控制核心,而是在各个传感器节点内部进行预处理,从而减轻了主控制系统的负担。
在本方案中,P87C591单片机作为超声波传感器的控制核心,它集成了CAN控制器,可以更有效地管理多个传感器节点。P87C591单片机不仅负责驱动超声波传感器发射和接收信号,还负责将接收到的障碍物信息通过CAN总线发送到机器人系统的控制核心。基于ARM架构的主控制系统通过接收来自各个传感器节点的数据,执行避障策略,进而指挥机器人做出相应动作。
硬件设计方面,超声波传感器包括发射和接收两个部分。发射部分使用LM386音频集成功放芯片,将单片机生成的40 kHz方波信号放大并驱动超声波发射头发射信号。接收部分则选用了红外遥控接收芯片CX20106A,虽然其最初设计用于处理红外信号,但在本方案中被证明能够高效检测40 kHz的超声波信号,从而实现精确的障碍物检测。
本文提出的基于P87C591单片机的CAN总线超声测距系统设计方案,有效地利用了CAN总线的优势,减少了系统资源的占用,提高了数据处理的效率。通过智能化的节点设计,各个传感器节点能够独立完成信号的发送与接收,显著提升了整体性能。这种技术的应用不仅有利于提高移动机器人的避障能力,而且对于推动机器人技术的发展具有重要意义。在未来的自主导航机器人设计中,这种CAN总线超声测距系统的应用将变得更加广泛,为机器人实现更加复杂和智能化的功能提供技术支撑。
基于基于P87C591的的CAN总线超声测距系统设计方案总线超声测距系统设计方案
移动机器人的安全避障问题一直是该项研究的基本问题,目前解决此问题的基本方法是采用多路超声波传感器
通过适当的安装角度达到获取多路测量信息的目的。对于多路超声波传感器的扩展,一般是在机器人系统控制
核心之上进行。这样做的缺点在于,超声波传感器的扩展占用了大量的系统硬件资源,另外大量的测量信息的
处理也浪费了系统软件资源。针对这一问题,笔者采用CAN总线扩展多路超声波传感器的作法。
传感器的扩展,一般是在机器人系统控制核心之上进行。这样做的缺点在于,超声波传感器的扩展占用了大量的系统硬件资
源,另外大量的测量信息的处理也浪费了系统软件资源。针对这一问题,笔者采用CAN总线扩展多路超声波传感器的作法。
这种作法有几个优点: 首先,CAN总线具有良好的传输防错设计,保证了数据通信的可靠性;其次,多路超声波传感器的设
计可由CAN总线智能节点实现,大大节省了系统硬件资源和软件资源;第三,由于CAN总线对于网络内的节点数在理论上不
受限制,所以随着对移动机器人研究的不断深入,对于整个机器人系统的总体设计可以灵活地在CAN总线上进一步开发。本
文介绍的CAN总线智能节点的设计以Philips公司的P87C591作为超声波传感器的控制核心。由于P87C591具有片上自带的
CAN控制器并且为CAN的应用提供了许多专用的硬件功能,因此又将它作为了系统的CAN总线控制器,大大节省了主控系统
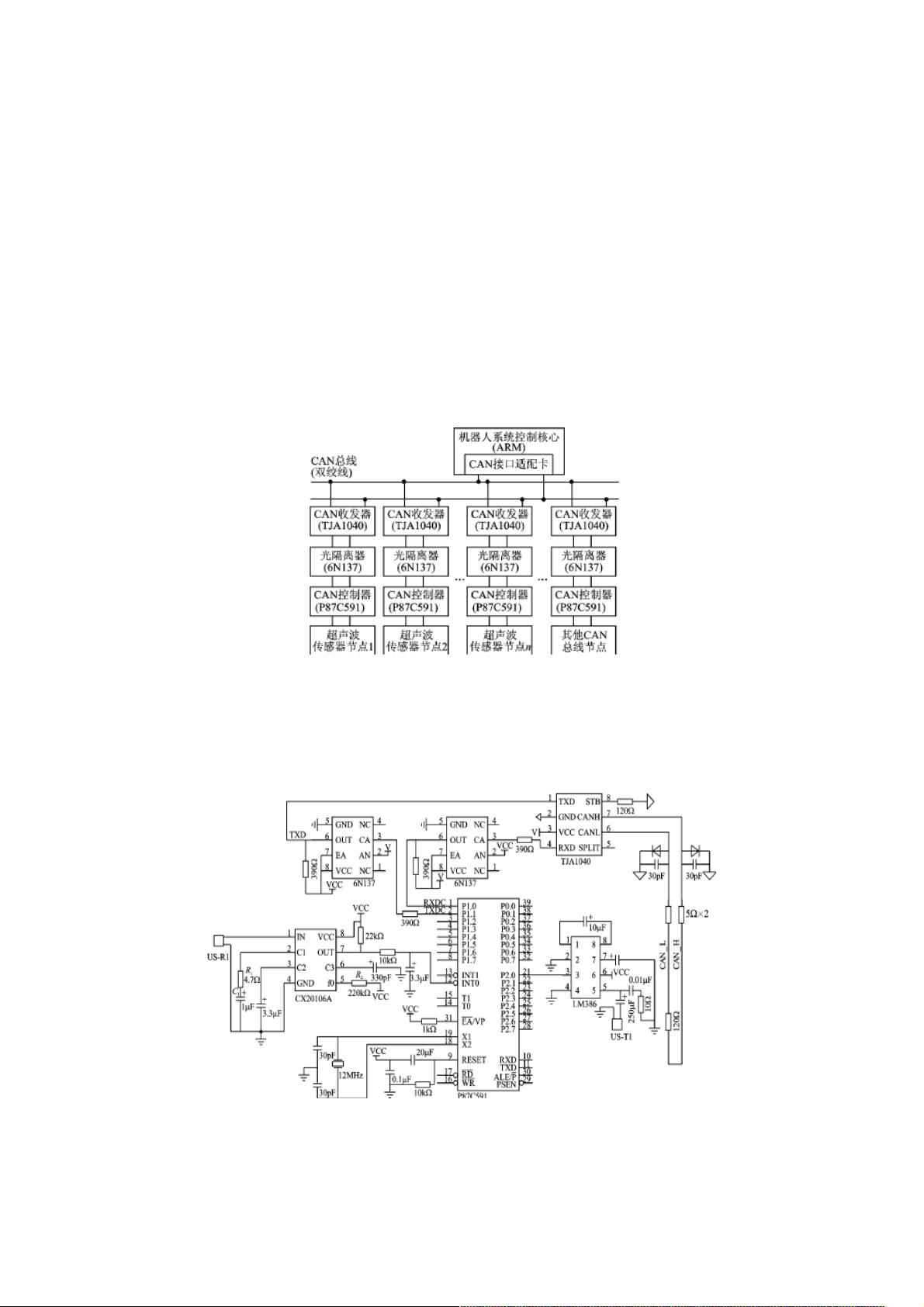
的资源。CAN总线的收发器采用TJA1040。系统总体结构框图如图1所示。
机器人系统控制核心由ARM实现。其主要功能是处理需要复杂计算的信息,将经过处理的信息再送回CAN总线,并对整
个网络进行管理。超声波智能节点控制系统的主要功能就是判断障碍物位置,将对移动机器人前进方向有阻碍的障碍物信息通
过CAN总线传回主控系统,由主控系统作出相应处理并进行避障动作。本文将着重介绍超声波智能节点控制系统。
图1系统总体结构框图
1超声波智能节点控制系统的硬件设计超声波智能节点控制系统的硬件设计
超声波智能节点控制系统的硬件电路如图2所示。P87C591是51系列单片机,对于大部分熟悉51单片机的使用者来说它的
使用方法十分简单。下面分别介绍各个组成部分。
图2超声波智能节点控制系统
1.1控制部分
超声波传感器的控制部分采用Philips半导体公司生产的P87C591。它是一个单片8位高性能微控制器,具有片内CAN控制
器,是从80C51微控制器家族派生出来的。它采用了强大的80C51指令集,并成功地包括了Philips半导体公司SJA1000 CAN
控制器的PeliCAN功能;全静态内核提供了扩展的节电方式;振荡器可停止和恢复而不会丢失数据;改进的1∶1内部时钟预分
频器在12 MHz外部时钟速率时,实现500 ns指令周期;内部具有的16 KB内部程序存储器完全满足本系统要求。
下载后可阅读完整内容,剩余3页未读,立即下载
139 浏览量
2021-07-12 上传
2022-01-22 上传
199 浏览量
2021-01-19 上传
125 浏览量
101 浏览量
185 浏览量
140 浏览量
115 浏览量
128 浏览量
2021-11-24 上传
160 浏览量
107 浏览量
2020-12-13 上传
2021-09-29 上传
资源评论


weixin_38617436
- 粉丝: 12
- 资源: 945









最新资源
- Navicat.zip
- 麻雀搜索算法(SSA)文章复现:《基于混沌麻雀搜索算法的无人机航迹规划方法-汤安迪》 策略为:立方混沌+反向学习初始化种群+反向精英策略改进发现者策略+正余弦算法改进加入者策略+动态调整警觉者
- “田园风光在线”:打造村旅游信息平台
- Ollama.zip大模型
- 土地利用/土地覆盖数据(蚌埠市)对应代码表
- 基于Unity 3D的旅游景点漫游设计
- 基于混沌-高斯变异-麻雀搜索算法(CGSSA)优化BP神经网络(CGSSA-BP)的回归预测(含优化前后对比)MATLAB代码 代码注释清楚 main为主程序,可以读取EXCEL数据 很方便
- xyy_localhost-2024_12_24_14_32_06-dump.sql
- C++模板与泛型编程入门教程:代码重用与类型安全
- 面向对象编程语言Objective-C基础语法详解及应用
- MATLAB在ThingSpeak中应用信号处理与数据可视化的技术实现
- VMware.zip虚拟机
- CFA知识点梳理系列:CFA Level II, Reading 6 Economic Growth
- goland 2024直接使用到2099年
- SecureCRT-9.6.0-mac
- Python 自动办公- Python分类汇总278张Excel表中的数据 Python源码
